 English
English français
français Deutsch
Deutsch русский
русский español
español português
português العربية
العربية 日本語
日本語 한국의
한국의 Tiếng việt
Tiếng việt
Call Us Now
TEL: +86-4000988557;
Teams: gfreex@hotmail.com;
WeChat: Troysupply_com;
QQ ID: 8936906.



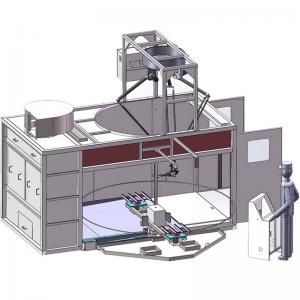
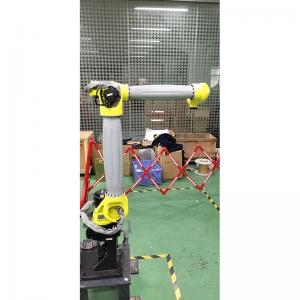
Industrial 6 axis robot arm training platform training targets:
*Usefully running 6 axis robot arm by program
*Usefully for I/O control with robot gripper
*Usefully for connection with PLC
*Usefully for daily maintenance
Item No.:
TRE500S-TPPayment:
CIF / FOBProduct origin:
ChinaColor:
Blue Black RedShipping port:
ShenZhenLead Time:
15Min order:
5
TEL: +86-4000988557;
Teams: gfreex@hotmail.com;
WeChat: Troysupply_com;
QQ ID: 8936906.
Instruction of six-axis robot training teaching platform
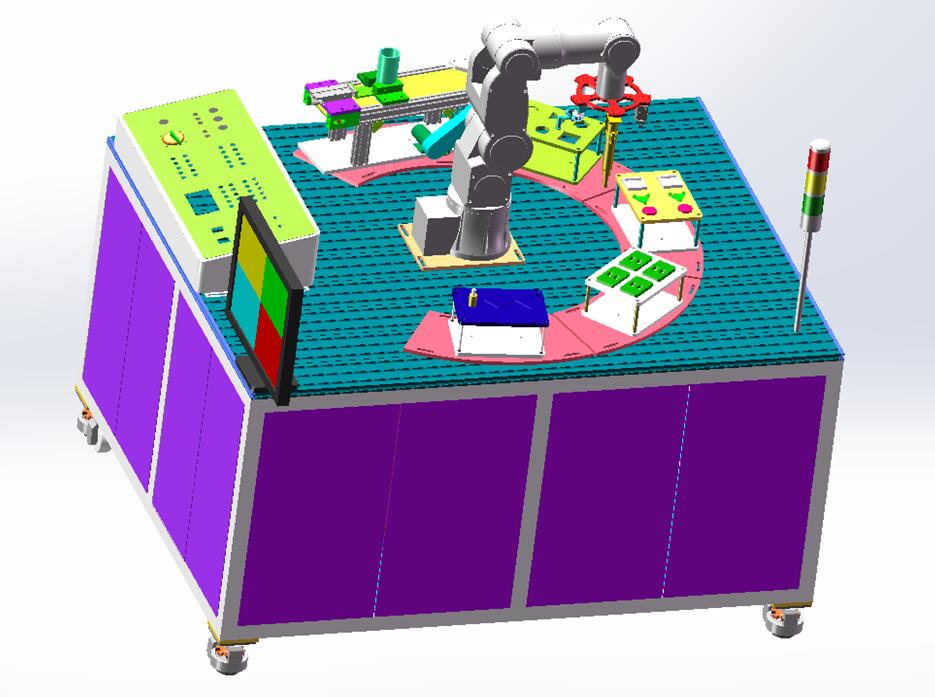
First: Introduction
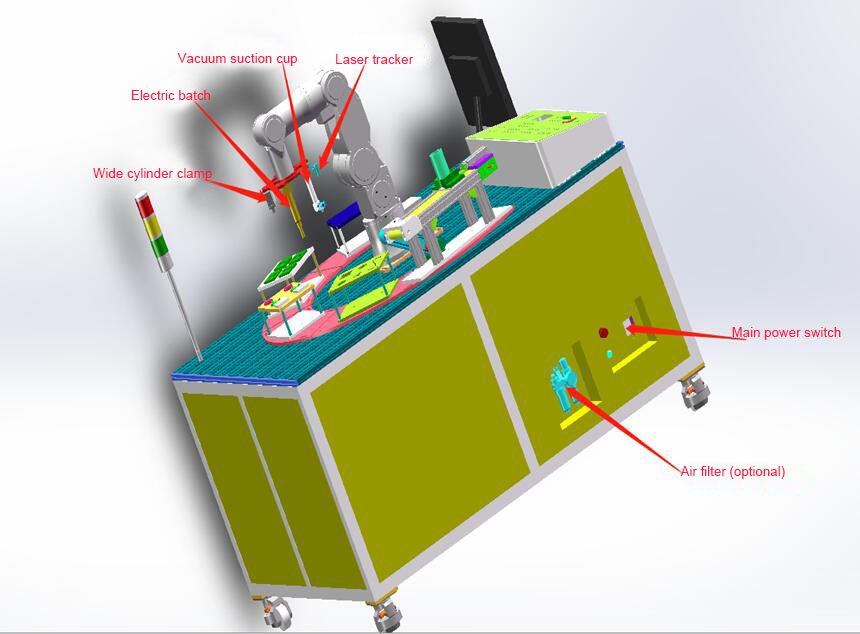
This robot teaching and training workstation is based on a robot, equipped with corresponding peripheral modular accessories, mainly including: industrial assembly line, palletizing handling, welding track module, material clamping, positioning pin, vacuum suction and detection.
Third: Instructions for each functional module (1)
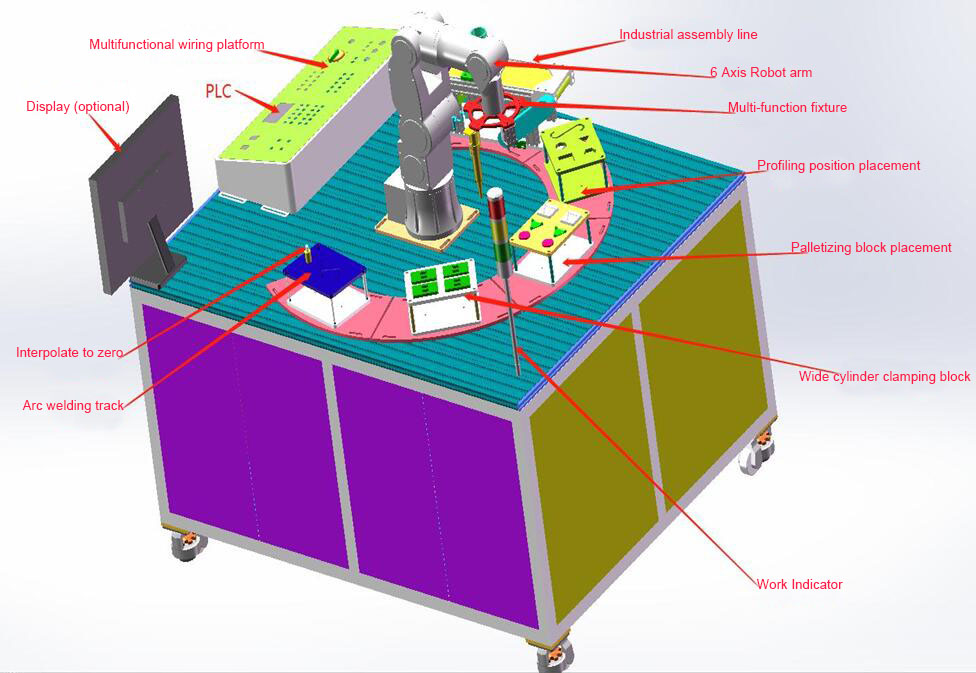
Instructions for each functional module (2)
Fourth: Description of the action flow of each functional module
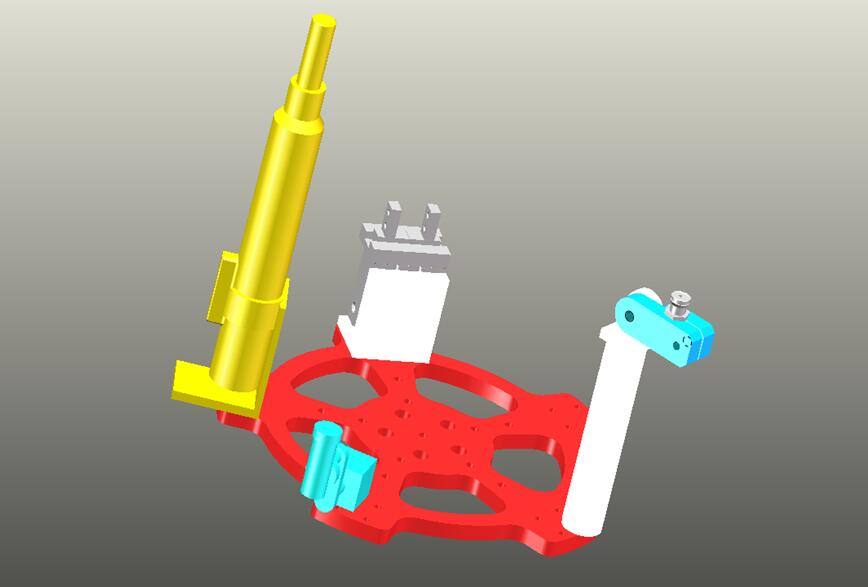
4.1 Multi-function fixture
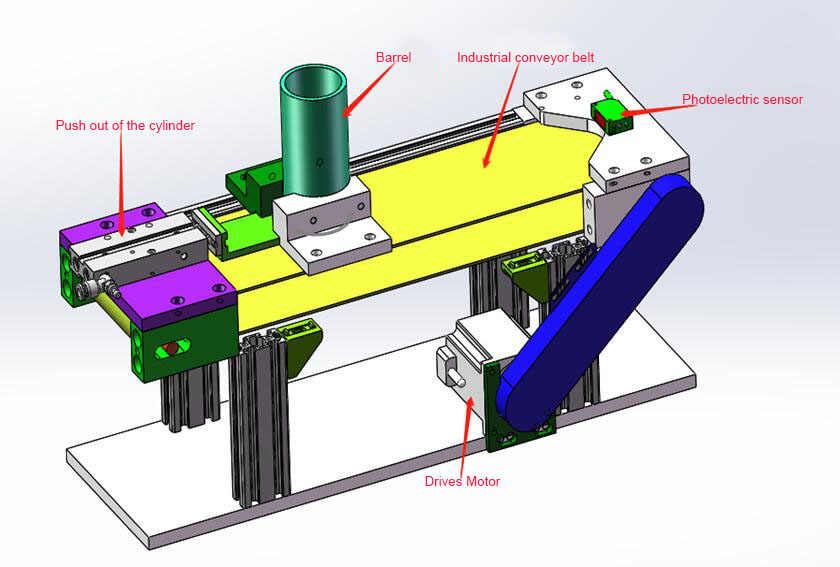
4.2:
Industrial transmission belt
Operation process description: the cylinder pushes the round block and falls
onto the conveyor belt, the belt transfers the round block to the front baffle
position, the sensor senses that the round block is in place and sends a signal
to the PLC, and the PLC controls the belt to stop the transmission movement
Move to the top of the round block and take it.
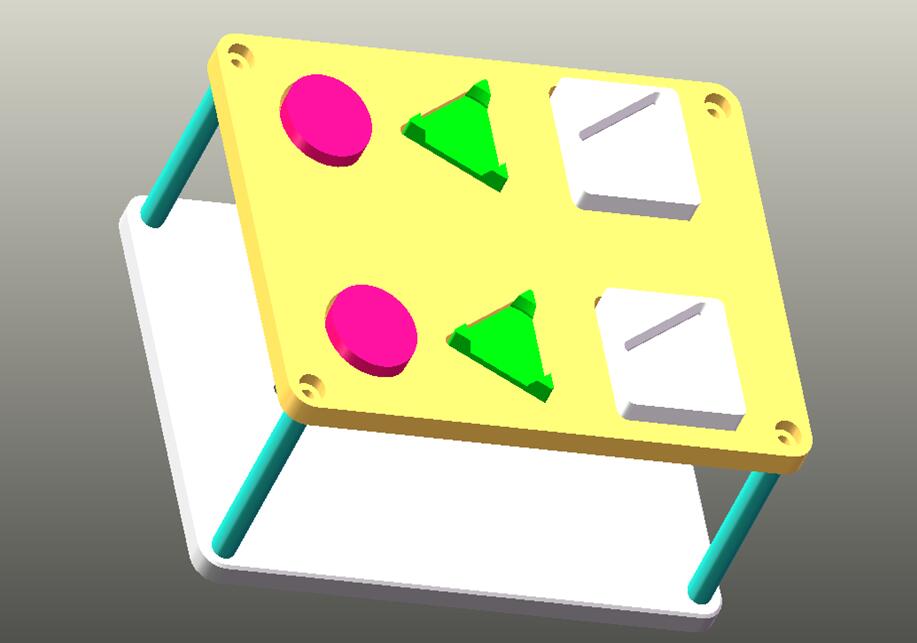
4.3:
Palletizing platform
Operation process description: The vacuum sucker sucks the triangle into the
square block. Then suck the circle into the triangle, and then put it back to
the original position.
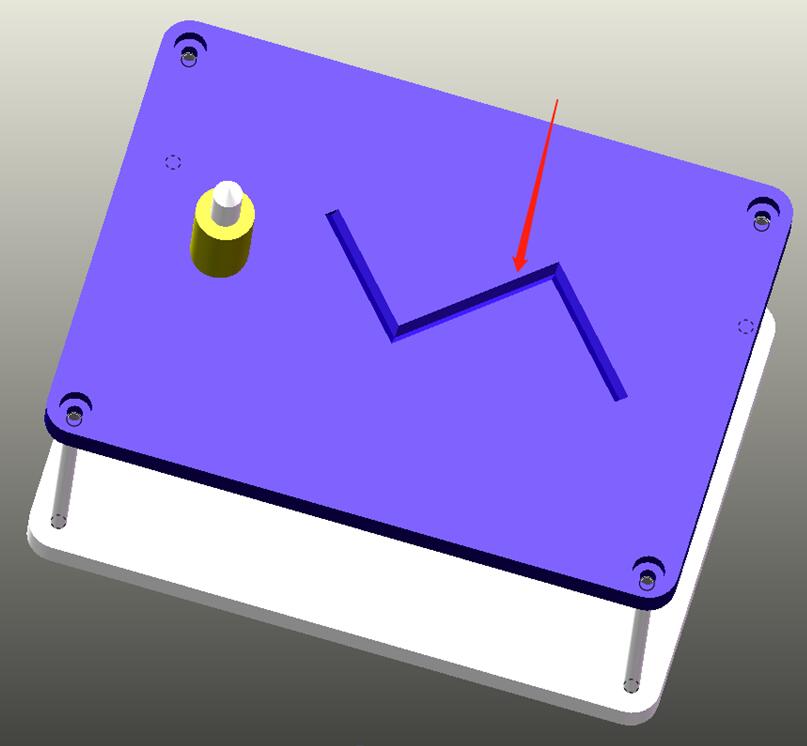
4.4:
Needle and arc welding track simulation
Action flow description: The manipulator moves the arc welding simulation
column (laser pointer) to the Z-shaped trajectory, and the manipulator controls
the column to walk along the trajectory.
4.5:
Cube gripping
Action flow description: The robot moves the wide cylinder gripper to the top
of the block, descends and clamps the block to the specified position.
Fifth:
Button description
Emergency stop: Control the robot to stop (press it to stop, turn it on and
press the start button to continue following the program.) Power: Control the
robot power management. Start: Control the robot to move according to the
program. Zero return: control the robot to return to the programmed zero
position.

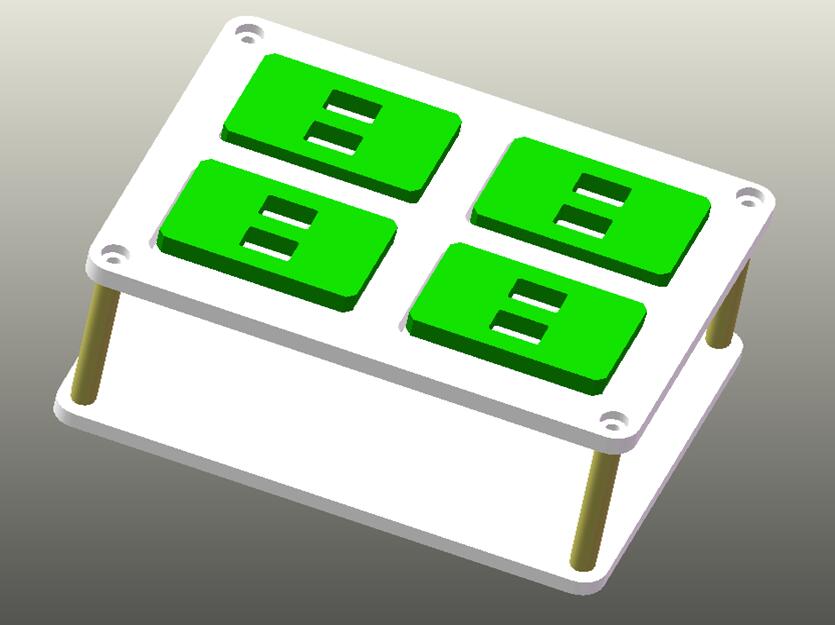
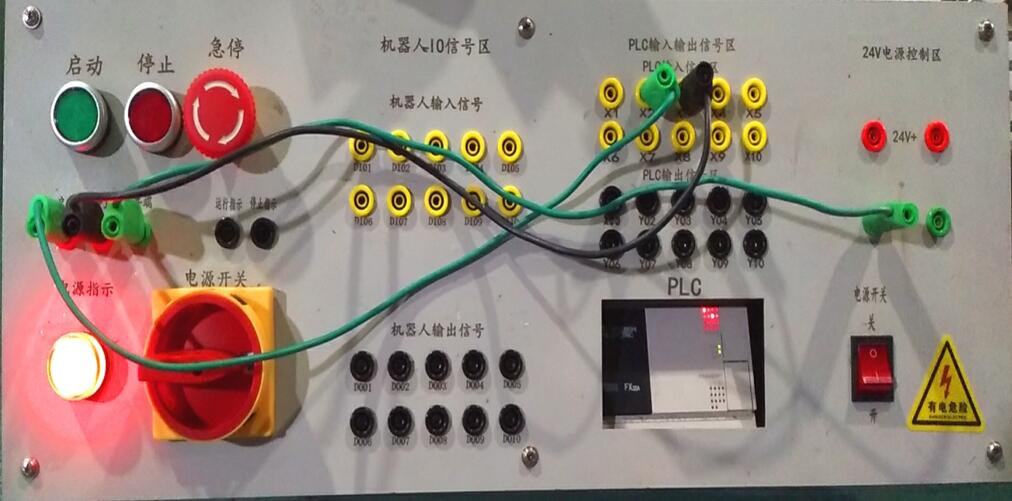
Sixth:
Description of control wiring board
Through this controller, the communication between the robot and the PLC can be
easily realized, and at the same time, the wiring method and skills can be
understood intuitively. Through the connection of various input points, the
construction of various settings can be quickly realized, which is convenient
for learning and safe.
Seventh:
Repair and maintenance
One: Please turn off the main power supply before repairing the equipment.
Non-professionals should not open the power box.
Two: Please clean the work surface and turn off the main power and air source
after each use.
Three: Before operating the equipment, please pay attention to the environment
within the robot's movement radius to avoid safety accidents!



The 6 axis robot Support PC, mobile phone, teach pendant, voice, APP, and other intelligent interactive control methods.

TRE06P 6 axis educational robot can be used for high school, robot engineer training school purpose.

The TRE500S body joint is made of high-strength aluminum to ensure the machine's high strength, high speed, high accuracy and high stability.

EDU Robot Applications: Commercial robots, teaching robots (teaching robots for universities, middle schools and elementary schools), collaborative six-axis robots, photographic camera robots, beauty and body robots, milk tea robots, auto parts, elevator parts, auto parts inspection tools, precision hardware, medical equipment accessories, etc.

Applications include CNC machining centers, CMM measurement centers, CNC lathes, wire cutting, milling machines, grinders and other equipment, and can be used with various surface treatments according to customer requirements.

Main product applications: commercial robots, teaching robots (teaching robots for universities, middle schools, and elementary schools), collaborative six-axis robots, photography and video robots, beauty and body robots, milk tea robots, auto parts, elevator parts, auto parts inspection tools, precision hardware, medical equipment accessories, etc. .

Main Products: Commercial robots, teaching robots (teaching robots for universities, middle schools and elementary schools), collaborative six-axis robots, photography and video robots, beauty and body robots, milk tea robots, auto parts, elevator parts, auto parts inspection tools, precision hardware, medical equipment accessories etc.

TR5-850 is a 4-axis vertical multi-joint robot with an effective punching load of 5KG. It can adapt to a variety of different application scenarios, and can customize five or six axes according to customer needs. The TR5-850 product is easy to understand and has a solid structure to meet the requirements of customers for product diversification, high efficiency, and product production.

TRE5-8CO is a 6-axis vertical multi-joint Cobot with an effective load of 5KG. It can adapt to a variety of different application scenarios, and can customize five or six axes according to customer needs. TRE5-8CO Cobot is easy to understand and has a solid structure to meet the requirements of customers for product diversification, high efficiency, and product production.

QS7AA010M is a new generation of general-purpose servo motor driver, which is optimized and improved on the basis of QS6 series servo driver. more stable and more convenient. More mature and stable, rich and complete information. The servo drivers add to 485 new communication functions, more convenient and reliable connection with the host computer or controller software.

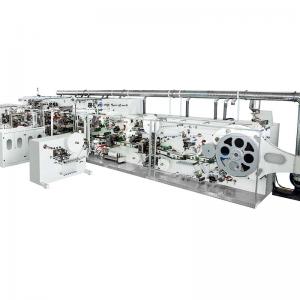
1. This machine is an automatic headband type KN95 mask production line, which automatically produces multi-layer masks with double-fold ears; 2. Driven by Mitsubishi servo motor, with high stability; 3. The machine adopts branded ultrasonic welding machine, which has good welding effect, good stability and low failure rate; 4. Panasonic PLC programming control, servo control, high degree of automation, high output and good stability; 5. Intelligent material supply, through the installation of sensors, realize the detection of material production, and the machine will stop and sound an alarm when there is no material; 6. Nose line: automatic line feeding and cutting; 7. LOGO pad printing, special LOGO or pattern can be customized according to requirements; 8. Automatically realize left and right ear strap feeding, cutting load and ultrasonic welding; 9. Fold the fabric that has been processed in half in half; 10. Through the mold, the folded fabric is further processed into finished products
TRLINE-N95 production line to produce products below: Face mask for hospital N95 face mask Face mask for Coronavirus Disposable medical mask
Intelligent cruise explanation automatically leads the way: *Adopt advanced wireless laser navigation technology to quickly scan and build real-world maps. *Automatic cruise explanation, accurate location *Voice activation automatically leads the way to the designated location *More than 70% coverage area, panoramic road conditions, safe obstacle avoidance.

Engine:4 Stroke; Seats:3; Horsepower:> 300hp Cylinders:4; Engine Capacity:1300cc;

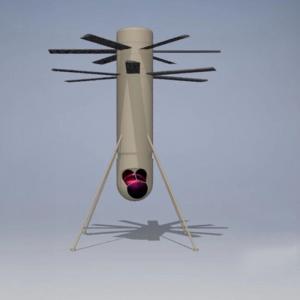
In addition to the vertical take-off and landing functions of conventional rotor drones, the dual-rotor series UAVs also have the advantages of compact structure, small weight, high portability, high efficiency, and long endurance. Suitable for reconnaissance, public safety, military and intelligence missions.

Similar your real girlfriend Customized body shape, face appearance and eye color options etc. Warm Body function Fluently English and Chinese speaking

CRP S80 Robot Controller supports upto 8 axis control (pulse type). It's designed for economic robot cabinet to be build up. CRP is good at welding application, so MIG/TIG welding solution can be provided to our customers.

Production Model: Fish style(KF94). Speed: 120+pc/min Rate of defect prodcution: Less than 1%. Face mask for Adult Size.
Smart Painting Robot Applications: This product is widely used in the spraying of toilet, washbasin, washbasin, squatting pan, mop pool, urinal, standing basin, washstand and other sanitary ware products, and fully meets its glazing needs.

*Stabilize and improve welding quality and ensure its uniformity; *Improve productivity, continuous production 24 hours a day; *Improve the working conditions of workers and work for a long time in harmful environments; *Reduce the requirements on workers' operation skills; *Shorten the cycle of product modification and replacement, and reduce the corresponding investment equipment; *Can realize batch product welding automation; *Save floor space. Main applications——Grinding and polishing Cutting, grinding, deburring, cleaning, polishing, water cutting and other processing applications

Product Type: handheld game console: Game type: RPG role-playing, ACT action game, AVG adventure game Operating system: liunx RAM: 16G Interface type: USB Video/audio interface: HDMI Connection method: wired Additional features: MP3 music player Video game classification: Fever, Elite, Hardcore

ADTECH QS7 series AC servo drives and motors are suitable for retrofit CNC machines and Linear modules !

V-cylinder engine classic motorcycle for decent guys. Global heavy motorbike dealers are wanted !

Similar your real girlfriend Customized body shape, face appearance and eye color options etc. Warm Body function Fluently English and Chinese speaking

Mini Helicopter features: 4-cylinder gasoline engine, 1800cc emissions, 120 horsepower, imported engine, lifetime warranty on the entire engine.

High-Speed Glue Spraying Cartoning Machine Specifications: Model: TR-ZC-G2 Conveyor Speed: 6000-9000 Pcs/h Carton Size (mm): L70-200*W35-85*H15-50 mm Power Supply: 220V/50Hz Machine Dimension: L6100*W1800*H2000 mm

THR8 Harley electric bikes are designed for people daily work and daily school traveling everyday with 70km each time battery charging.

Palletizing Robot solutions for Large board picking and placing: *200kg payload *3000mm working radius *0.03mm Repeat Accuracy *Yaskawa Servo system *LNC Robot control system

Anti drone device is designed for airport control, public safty control etc.

Technical Parameters: Model TR350PM Film width Max.350mm Bag making length 65-190 or 120-280mm Bag making width 50-160mm Product height Max.40mm Film roll diameter Max.320mm Packing speed 40-230bag / min Power specifications 220V, 50 / 60Hz, 2.8KVA Machine size (L) 4020 × (W) 720 × (H) 1320mm Machine weight 600kg

*Compact structure, easy for installation and maintenance *PLC control, highly automatic *HMI is easy to operate *Multiple positions are equipped with detecting sensors, which are reliable to detect exceptions to reduce wastes. *Key parts and components use world famous brands for ensuring the stable performance of machine *Stable running and high efficiency

Tungsten SEM | TR3200 High-performance tungsten SEM microscope with excellent image quality capabilities in both high and low vacuum modes. With a large depth of field and a user-friendly interface, the TR3200 SEM microscope enables users to characterize samples and explore the world of microscopic imaging and analysis.

Mini Electric Forklift Introduction: Smart Forklift is designed to lift standard pallet with 500kg load capacity and 3000mm lifting height. Mini Electric Forklift is an ideal facility to load/unload goods in stacking warehouses, super-market, workshops, production lines or handle goods on/off trucks, containers, etc

TR-R6 Collaborative Robot: Lightweight collaborative robot, suitable for industrial applications such as screw driving, loading and unloading, grinding, etc. Repeatability accuracy ±0.02mm, absolute positioning accuracy ±0.5mm, a powerful tool for automation transformation in the industrial field!

Gantry Type Welding Machine can be provided a full solution for massive welding job with regular welding parts. Very easy operation on site.

Ion implantation equipment Features: • high productivity IonSolar has the function of continuous film feeding, and the production capacity of a single machine can reach 1800 pieces/hour, which makes it possible to equip a production line with only one machine, and fully realizes a good match with the production capacity of the existing production line.

【Model】TR10165B-310 【Motion type】Multi-joint type 【Rated load】165kg 【Motion radius】3100mm 【Weight】1600kg 【Number of axes】4 axes

Arm Length: 2300mm; Payload: 50kg; Suitable for heavy payload palletizing job; Easy operation by our teach pendant.

Vertical Parking Garage advantages: ◇ It saves space and can be doubled by occupying only 2 parking spaces. It does not require a large area to build a three-dimensional parking lot; ◇ Smooth operation, no vibration and noise; fast operation speed, short access time; ◇ Standardized mechanism design, smooth operation, safe and reliable; ◇ Equipped with safety protection devices and emergency stop devices to ensure safe operation of access vehicles; ◇ Equipped with photoelectric detection, program control, automatic access vehicle, and can be managed unattended; ◇ One-time investment, long-term benefits.

Digital Microscope TVN-600II main features: (1)Magnification knob: Rotate the magnification knob to make the image the right size on the display, depending on the size of the product (2)Light source: Ring light source (3)Up and down adjustment knob: adjusts to the height of the product to give a clear image (4)Light source adjustment knob: adjusts the level of brightness of the light source (5)USB port: can be connected to a USB mouse for operation and a U disk for saving pictures

The autonomous mobile robot TR-Max600L based on visual perception has a more dexterous body and can move freely in small spaces to meet the needs of all-scene operations. Support low obstacle and dynamic obstacle detection to meet the needs of people and vehicles mixed operation. Unlock more application scenarios through a variety of bodywork modules.

ROKAE CR20C xMate — 20kg, 6-Axis, 1798mm Payload 20kg Reach 1798mm DOF 6 IP IP67 Brand: ROKAE | Partner: TROY Supply

Radiation Protection Suit: The whole set consists of: nuclear radiation protective clothing, respiratory protection device, nuclear protective gloves, nuclear radiation protective leather boots, portable moisture-proof drag box.

Cobot CS612 Parameters: Six degrees of freedom, weight 33kg, load 12kg Working radius 1304mm Repeat positioning accuracy ±0.05mm Maximum speed 3.0 m/s Typical power 500W Protection grade IP54

Commercial Fully Automatic Fried Egg Machine: This is fully automatic Fried Egg Machine features touchscreen control and intelligent temperature control, and can make approximately 1-120 eggs per hour. You can choose between medium-rare, medium-well, and well-done, freeing up your hands and meeting the needs of a wide range of customers.

Six degrees of freedom, dead weight 17.5kg, load 6kg Working radius 914mm Repeat positioning accuracy ±0.03mm Maximum speed 2.8 m/s Typical power 250W Protection grade IP54 Collaborative Robot is designed for safety concept. Human and Robot can be working at same production lines together.

Anti drone device is designed for airport control, public safty control etc.

Automatic fish cutting and scaling machine: Model: TR-017 Product use: Cut fish back and remove fish scales Input voltage: 220V/380V Total Power: 1.5kw Dimensions: 600*600*950 (mm) After-sales service: One year warranty and lifetime maintenance.

【Model】TR1030A-230 【Action type】Multi-joint type 【Rated load】30kg 【Motion radius】2300mm 【Weight】700kg 【Number of axes】6 axes

ADULTS MODEL Iumping Stilts: Aluminum alloy Fram with a half plastic pedal; Movable pedals; Loading body weight : 50-70KG, 70-90KG; 90kg-100kg. Colour: Black, blue, yellow, gray Packaging: 1 pair/ box packaging Net weight: 7KG

Anti drone device is designed for airport control, public safty control etc.

900cc V-twin Cylinders Belt Drives Heavy Cruise Motorbike

This equipment is a high-quality product developed by ourselves according to market demand after learning the advantages of European models. Mainly used for packaging medical disposable nitrile/latex gloves. Continuous model, easy to operate and good stability. Newly improved air blasting device, the finished product is smooth and beautiful.

Boat Specifications: Product name: 68-foot luxury yacht Product number: TR-MY68 Main dimensions: 20.60×4.80×2.40m Host power: 370Hp×2; Crew: 12 people Draft: 1.0m; Speed: 18Kn Navigation area: inland river B level

TR600B four axis SCARA industrial robot The robot is a multi-joint four-axis robot with complete independent property rights. It adopts a high-performance controller to control the robot to achieve high-speed point motion, spatial linear interpolation motion, spatial arc interpolation and other functions. It is suitable for transportation, Various industrial occasions such as loading and unloading, spot welding, gluing, etc.

Heavy-duty Unmanned Tractor model T300-H features: *EPS electric power steering, flexible and precise steering *Laser SLAM + blind spot radar navigation *Towing capacity up to 33Kn, smooth and reliable operation *Quick-release design for easy inspection and maintenance *High-power servo motor drive for high parking accuracy *All-weather operation, both indoors and outdoors.

ROKAE SR3C: 3kg payload, 705mm reach, 6-axis xMate collaborative robot with integrated force sensing. Ultra-compact benchtop cobot for precision electronics assembly, lab automation, and delicate component handling. Partner: ROKAE | TROY Supply.
EDU Robot Applications: Commercial robots, teaching robots (teaching robots for universities, middle schools and elementary schools), collaborative six-axis robots, photographic camera robots, beauty and body robots, milk tea robots, auto parts, elevator parts, auto parts inspection tools, precision hardware, medical equipment accessories, etc.

ADTECH 3-6 Axis dispensing control system for high-precision motion control system.

The unmanned forklift (AGV) adopts Japanese AGV technology. After years of localization exploration and testing, it now has excellent practicality and rich applicability. The characteristics of in-situ rotation, human-computer interaction friendliness, easy expansion, and easy integration have become the technical representatives of Uwangte AGV. The AGV scheduling system has the function of route control, route avoidance and automatic calls and task scheduling.

The ai robot wife with real skin is similar to your real girlfriend. Customized body shape, face appearance and eye color options etc. Warm Body function Fluent English and Chinese speaking

MV800 Motorcycle is looks like Harley style, comfortable seat with strong engine with 800cc, V-cylinders. feel pleasure with your holiday traveling in a great weather.

Unmanned Container Transport Vehicle features: The TR-CONT70S is a new generation of AI-powered container transport vehicle. It is lighter, lower, and narrower, allowing for better adaptation to horizontal quay unlocking processes. Equipped with an L4-level driving system, it efficiently interacts with quay cranes, rail-mounted cranes, locking stations, and automatic charging stations throughout the entire process, achieving cost savings of over 30% compared to traditional AGVs used in automated terminals.

Similar your real girlfriend Customized body shape, face appearance and eye color options etc. Warm Body function Fluently English and Chinese speaking

Electric Surfboard features: Season: Summer, Spring Suitable For: Universal Age Group: Adult Feature: Light & High Quality Material: Carbon Fiber Product Name: Efoil Electric Surfboard

The intelligent comprehensive management platform is the dispatch and management center and data center of unmanned cleaning vehicles, which can monitor and globally manage the operations of unmanned cleaning vehicles belonging to different projects. It not only facilitates users' daily maintenance and management of equipment, but also further improves the visualization, digitization, and intelligence of cleaning area operations, bringing a qualitative leap to the level of cleaning management.

Robot Applications: ——Material handling and palletizing Greater flexibility, more stable performance, and lower energy consumption; Maximum throughput with high-speed performance; Long working time; Fixed automation.
The TRE500S body joint is made of high-strength aluminum to ensure the machine's high strength, high speed, high accuracy and high stability.

T-Shirt Folding Machine model: TR-61A Features. 1. The equipment has a scientifically designed structure, is convenient, and highly adaptable. 2. The equipment is easy to maintain and quick to operate, with a high level of technical sophistication. 3. The equipment can effectively increase the folding speed of quilts compared to manual labor.
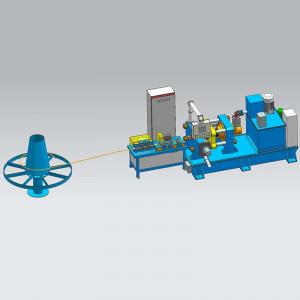
Phosphor Bronze Ball Upsetting Machine parameters: Upsetting Phosphor Bronze Ball Diameter Range: φ50-φ60mm Extrusion force: ≥120t Production efficiency: ≥8 capsules/minute Total weight of equipment: ≥10t Yield index: ≥99.9% Power consumption: ≤45Kw.h/t

Cobot CS66 Parameters: Six degrees of freedom, weight 20kg, load 6kg Working radius 914mm Repeat positioning accuracy ±0.03mm Maximum speed 2.6 m/s Typical power 250W Protection grade IP54

Unmanned Delivery Robot: The second-generation high-performance TR-UB003 unmanned delivery vehicle, designed specifically for open roads and campus terminal delivery scenarios, has L4 level autonomous driving capabilities and can achieve the last five kilometers of delivery to the user.

Production Model: Cup type Speed: 25+pc/min Rate of defect prodcution: Less than 1% Face mask for Adult Size.

Engine:4 Stroke; Seats:3; Horsepower:> 300hp; Battery :12V, 36A 4 Cylinders; Color:Optional; Product Size:3100 * 1200 * 1100MM Maximum load:200kg; net weight:300kg; engine displacement:1300CC Maximum power:63KW(6000RPM); Single package size: 31X12X11 cm Single gross weight:20.000 kg; Maximum power:63KW(6000RPM) Maximum torque:11Nm(4000rpm); Lubrication system Dry oil Cooling system Water cooling double loop; Start method Electric start ECU Fuel tank capacity:35L; Oil amount :3.5L; Starter motor:380W

High-precision multifunctional CNC cutting machine specially developed for mass production: Electronic safety device This series of cutting machines is suitable for the clothing industry, shoe and hat industry, luggage industry, automobile interior and home industry, sofa/seat industry, plush toy industry, composite fabrics, and can reach a standard thickness of 7 cm after adsorption. This cutting machine has excellent cutting speed and maintains the highest accuracy among similar cutting machines. It has excellent energy saving, low carbon, smart high technology.

Inspection four-legged Mini type of Robot Dog applications: Facing the application requirements in complex and dangerous environments, it provides intelligent solutions for application scenarios such as firefighting and rescue, anti-terrorism, and anti-explosion.

Ultrasonic Models: 20K2000W; 20K2600W; 15K2600W. for one to 2 line face mask machine high speed one to 1line face mask machine KN95 face mask machine KF94 face mask machine

Earth Pressure Balance TBM: Muck is used as the main medium to balance the ground pressure on the tunnel excavation surface, and the slag is discharged through a screw conveyor. The excavation diameter covers 3 meters to 14 meters.

2026 ZX-Moto 820RR-RS 818 Displacement(cc) 99 /12000 Max. Power(kW/rpm) 80/9500 Max. Torque(N.m/rpm) 193 Net.Weight(kg)

Relying on scientific management system, convenient transportation conditions, strong production capacity, testing methods and perfect sales network, our factory manufactures series of products with high quality, low price and beautiful appearance to serve various industrial and mining enterprises. Main business: a variety of high-strength chains; lifting machinery; conveying machinery; mine support products; crane parts and maintenance services Ship chain, green decoration chain, stainless steel chain, bucket elevator-hoist chain, chain hook, hopper, sprocket, plate chain and other accessories, conveying machinery-FU conveyor accessories, chain conveyor accessories, scrapers Plate conveyor accessories, slag conveyors, slag remover accessories, mine support-bolts, anchor plates, W steel belts, anchor cables, anchoring agents and other supporting products. The above products are used in: lifting, metallurgy, coal, petroleum, building materials, cement, electric power, chemical industry, shipbuilding, transportation and greening industries. Non-standard products can be customized according to user needs.

The main functions of the Sanitation Robot: 1, Intelligent identification 2, quick positioning 3, Accurately grab Garbage sorting, robots can identify different types of garbage for sorting and put them in different garbage bins

TR800B four axis SCARA industrial Robot: The robot is a multi-joint four-axis robot with complete independent property rights of LBD. It uses a high-performance controller to control the robot to achieve high-speed point motion, spatial linear interpolation motion, spatial arc interpolation and other functions. It is suitable for handling, loading and unloading. , Spot welding, gluing and other industrial occasions.

Robot Arm Applications: ——Spraying and cutting Stabilize and improve welding quality and ensure its uniformity; Improve productivity, continuous production 24 hours a day; Improve the working conditions of workers and work for a long time in harmful environments; Reduce the requirements on workers' operation skills; Shorten the cycle of product modification and replacement, and reduce the corresponding investment equipment; Can realize batch product welding automation; Save floor space.

6 Axis Desktop Robot is designed for electric components assembling and CNC machine feeding etc.

This solution's topology primarily encompasses front-end pretreatment, UV curing, and repair acceptance. Pre-treatment includes equipment such as pipeline inspection robots, cutting robots, and high-pressure endoscopes. These devices efficiently inspect and pre-process the original pipeline's condition, providing data-driven decision-making for subsequent UV curing repairs. Trenchless UV curing technology allows for rapid and precise pipeline repairs, extending pipeline life.

Collaborative Service Robot Applications: 1, Bar/Pub as a bar tender 2, Production line assistant 3, Demonstration / Showroom

Relying on scientific management system, convenient transportation conditions, strong production capacity, testing methods and perfect sales network, our factory manufactures series of products with high quality, low price and beautiful appearance to serve various industrial and mining enterprises.

Robot Street Sweeper Specification: Cleaning width: 1900mm Volume: 230L Maximum travel speed: 60kg/h Water tank capacity: 80L Maximum cleaning capacity: 13000 square meters/h Cleaning efficiency: 3600 square meters/h Working noise: 56-70db Battery cruise: 6 hours

Luxury Yacht Specifications: Product name: 110-foot luxury yacht Product No.: MHY110 ′ Main scale: 33.30 × six point eight zero × 2.50m Host power: 670Hp × 2 sets Crew: 25 Draft: 0.90m Speed: 22kn Navigation area: Coastal

Palletizing Robot solutions for Fruit Baskets: *500kg payload *3000mm working radius *0.03mm Repeat Accuracy *Yaskawa Servo system *LNC Robot control system

Best 900CC motorbike in China 2020 !

The Stratospheric Floating Wind Power System offers a renewable electricity solution that surpasses existing energy systems in terms of comprehensive cost and stability. It is the world's only disruptive renewable energy system to enter commercial operation, aiming to become the energy core of humanity's Fourth Industrial Revolution.

Embodied AGI Functions: Cooperate with Huawei Cloud to explore the application scenarios of "Pangu Embodied Intelligence Large Model + Kuafu Humanoid Robot"

The small models of the MOTOMAN-GP series have high levels of movement speed and trajectory accuracy, further improving on-site production levels. At the same time, Yaskawa provides optional configurations suitable for the food field and environmental resistance levels to protect your production.

Product Applications: * Industrial Robots vision system * Industrial machines vision system * Defect Products Inspection * Porduct Position Controls * QC Checking for micro products

Specifications Compatibility: Outdoor life Features: Waterproof Structures: Monocular Increase: 12X Objective Lenses (mm): 50 Eye lens (mm): 23 Prism Type: BAK4 Net weight / kg): 0.5 Listed day: 05/18/2020

MIG and TIG welding robot for steel, stainless steel and alumium etc. Laser seems tracking system is available for this robot !

UV Disinfection AI Robot is suitable for the hospitals and public venues. Good in control with the virus such as H1N* and COVID-19 by air media spreading

Wastewater Treatment Equipment Ranges: 1. Removal of suspended solids in wastewater after biochemical treatment. 2. Solid-liquid separation in industrial process ①Separation and washing of slurry in hydrometallurgy ②Filtering of tungsten smelting wastewater before separation ③Solid-liquid separation of magnesium hydroxide slurry ④Solid-liquid separation of coal mine water. 3. Pretreatment of reverse osmosis or nanofiltration process.

Working Radius: 400mm Payload: 1.5kg Repeat accuracy: 0.02mm Drag teaching system Anti-collision function

10KW wind turbine power station main ranges including the body, controller, inverter. Need batteries, solar panels or towers. 10KW wind turbine can be used for TV, lighting, electric fan, washing machine, refrigerator, rice cooker, water pump, air conditioner, and small village lighting.

1. Battery capacity: 13300 400Mah 2. Juice capacity: 2.0 ml 3. Nicotine salt: 3%-6% choice 4.500 ports/carry three filters 5. Output voltage: 3.6V 6. Size: Φ14*85mm 7. Material: stainless steel 304 8. Color can be customized 9. Taste can be customized

TR-M2 Pipe Network Inspection Robot: Quickly locate internal structural defects of drainage pipes. Meet the inspection needs of conventional pipelines and complex pipelines. Rapid testing generates test reports.
Electric Microscope TVN-600II_A main features: Function 1: Flashlight; Solve the problem of unclear fonts on PCBA chips Function 2: Depth of field synthesis; Solve the problem of blurred display of different depths of field Function 3: Light source shielding; Solve the problem of reflection of FPC soft board affecting observation Function 4: Ethernet port; It is convenient to transfer pictures, and there is no problem with rejecting USB disk.

*Robot flexible gripping movement of the soft pliers is similar to that of human fingers. *Very flexible and can adaptively wrap objects without causing physical damage. *Customized for customers who demand intelligent, damage-free, high-security and highly adaptable gripping.

Robot applications——Spraying, Material handling and palletizing Greater flexibility, more stable performance, and lower energy consumption; Maximum throughput with high-speed performance; Long working time; Fixed automation.

Features Easy operation Best configuration with high performance Long arm length suitable for wide places Max payload 10kgs Fast speed with 0.43S cycle time High precision up to ±0.015mm

Name: Oil Drum Forklift Brand: OEM Steel plate thickness: fork 8mm Weight: 50kg Maximum lifting speed: 20cm/s Number of casters: 4 Caster Material: Nylon Sheet thickness: 4mm square tube Special industries: logistics industry / loading and unloading teams / factories Load capacity: 500 Fork Length: 90cm

ADTECH 12 Axis CNC Spring Maker Machine Controller is designed for building up the no CAM type spring machines.

Wheeled Dual-Arm Robot---Helios! Industrial-grade motion positioning accuracy: 10mm; Arm manipulation accuracy: ±0.1mm; Full body degrees of freedom: 42; Multimodal fusion perception: Pose-Vision-Force control strategy: Tactic of Pose + Vision + Force; Maximum payload per arm: 5kg.
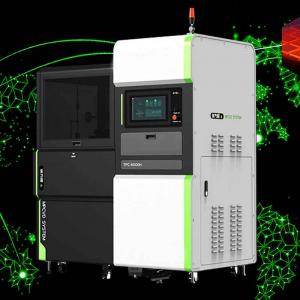
There are no internal electrodes in the microwave plasma chemical vapor deposition resonant cavity of TR-6650, which can avoid pollution caused by electrode discharge. Its operating pressure range is relatively wide, and the plasma generated has high density, large area, high stability, and no It is in contact with the vacuum wall to avoid contamination of the film by the wall.

Purpose and characteristic: This sterilization machine can quickly kill 99% bacteria and viruses, including: influenza, hepatitis virus, e. coli, golden yellow staphylococcus aureus, bacillus subtilis variant spore and various black mildew source body, the allergy source, to the daily life of people to provide a safe environment, especially suitable for tableware, food, cosmetics, Chinese herb, and public goods, children's toys and other items such as surface fast disinfection and deodorization in addition to taste

4 axis Delta Robots/Spider Robots are suitable for food packaging industry. The robot vision system is availiable also !
Main Applications: large-scale architectural glass, home decoration, exterior wall laminated glass, etc. Construction, bathroom, electrical appliances, furniture glass, etc.

ROKAE CR35-45C: 45kg payload, 1947mm reach, 6-axis xMate collaborative robot. The most powerful cobot in the ROKAE lineup for heavy palletizing, engine assembly, and industrial material handling. Integrated force sensing for controlled heavy-part placement. Partner: ROKAE | TROY Supply.

TR-HEPG series high-precision electric parallel grippers features: *High Precision *High stiffness *Five side installation * Grab feedback *Network application

QT Series Chocolate Tempering Machine Introduction: The chocolate tempering machine is an important piece of equipment in the production of pure fat chocolate. This machine can automatically control the temperature required at each stage of the chocolate tempering process to ensure the quality of the chocolate.

【Model】TR1030B-185 【Action type】Multi-joint type 【Rated load】30kg 【Motion radius】1850mm 【Weight】230kg 【Number of axes】4 axes

Abdominal Toning Belt features: * Smart phone controls * EMS IC chip * 8 difference mode * 50 levels * Auto stop by 25 minutes * One button operation
The MINEBEE super mini drones are coming soon !!!

Easy to operate: Force-free techingeffectively reducesdebagging time and learning cost.PortablePC,friendly man-machine operation interfacemakes the robot easier to use. Modularity: All-in-one module of reducer,motor,encoderand drive,which is convenient for quickdisassembly. Quick deployment: 3kg in rated load with 13kg in weight.Light-weight installation and flexible deployment.
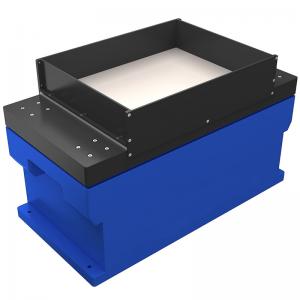
TR-R500 industrial flexible vibration plate is a star product developed, produced and sold by our R&D. It breaks through the material jamming, abrasion material, and the feeding problem of special-shaped parts of the traditional vibrating plate.

Microscope 3D View TVN-800_3D Features: * LED ring light source, dynamic adjustment * Automatic edge finding * Automatic circle finding * Picture save and export * Data save and export * Zoom without blur

【Model】TR1005A-099 【Action type】Multi-joint type 【Rated load】5kg 【Motion radius】990mm 【Weight】55kg 【Number of axes】6 axes

Digital metallographic microscope(TVN-MT4K80) is an optical inspection equipment developed for high-end manufacturing and research in the semiconductor industry, silicon wafer manufacturing industry, electronic information industry, metallurgical industry, medical testing, scientific research, etc. As a high-end metallographic microscope, users can experience its excellent image effects and a clear microscopic world at high magnification when using it. The MT40 microscope can be widely used in semiconductor research and development, manufacturing, FPD, circuit packaging, circuit substrates, materials, castings/metal/ceramic parts, and precision mold inspection. This instrument uses a high-power LED lighting lamp with two lighting forms: reflection and transmission. Bright and dark field observations, DIC observations, and polarized light observations can be performed under reflected light illumination. Bright field observations are performed under transmitted light. The stable and high-quality optical system makes the image clearer and the contrast better. The design that meets the requirements of ergonomics makes you feel comfortable and relaxed at work.

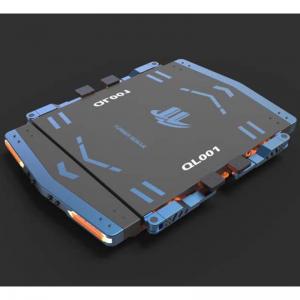
Lithium Ion Battery production line features: The equipment is a blade battery pack production line that is automatically transported by AGV and realizes production processes such as box feeding, gluing, wiring harness installation, and testing. 1. Compatibility: 18650 and 21700 can be produced (can be customized according to customer batteries) 2. High yield rate of welding: imported KS aluminum wire welding machine is adopted; with self-checking wire drawing function

Graphene Carbon Crystal Geothermal Blanket Electric Heating Carpet Geothermal Pad, Nordic Minimalist Style, With Temperature Controller, Perfect For Cold Winters, Power 500W-2000W.

The world's lightest active 20kg waist-assisted exoskeleton robot product is a small device with great assistance, high cost performance, high flexibility, and is easy and comfortable to wear. Currently, only prototypes are available for trial use, but it has attracted enthusiastic attention from overseas customers and has received orders. It can be widely used in logistics, industry, and nursing fields.

Humanoid Robot Lower Limb Platform Model: TR-SA01 Height, width and thickness: 1.35m 0.35m 0.25m Total degrees of freedom of the legs: 12 Degrees of freedom of a single leg: 6 Maximum torque of the knee joint: 160 Nm Hollow wiring of all joints: Not required Joint encoder: Dual absolute magnetic encoder Power supply: External power supply and built-in lithium battery 48v 0.5-1 kWh optional Charger: Free with the machine Battery life: About 2 hours, depending on the algorithm and load Warranty period: 18 months (customers need to pay for parts)

1.6 Ton Single Person Electric Oscillating Reach Forklift Standard configuration: The 1000ah battery automatically refills with water. Integrated handle. Hoesch mast imported from Germany. Escape device, emergency device. Active safety: the fork cannot be driven without being in the basic position. Front wheels with active damping to adapt to uneven ground. The United States imported proportional slide valve SUN. Front wheels in a two-wheel configuration. Electric steering.

Feed Packaging Requirement: Bag form user provided Single package net weight 25-50kg Single equipment packaging capacity 280-380 bags/hour

AI Image Measuring Instrument Scope of application: Provide efficient and complete measurement solutions for high-end customers, suitable for domestic military industry, aerospace, automobile engines, scientific research institutes, semiconductors, chips, precision electronics and other high-end manufacturing industries. Exclusively develop AI-guided intelligent capture and edge grabbing algorithms to achieve automatic recognition and measurement of all surface feature boundaries.

1100CC 4 wheels drive 67 horse power 4 cylinders by fuel injection

Floor cleaning Robot: It's relying on mature SLAM robot autonomous positioning and navigation technology, through the collision avoidance design of lidar + 3D camera,precise navigation and positioning, replacing manual labor with robots, reducing the difficulty of ground cleaning, improving cleaning efficiency and quality, Easily competent in various complex large scenes, with the advantages of simple operation, comfortable use, high efficiency and speed, etc., it has become the new favorite in shopping malls, hotels, high-speed railway stations and other fields.

TR30 Cobot Features: TR30 is a new generation of six-axis collaborative robot products based on human-machine collaboration technology, covering application scenarios such as palletizing, handling and high torque. *Payload: 30kg *Working radius: 1403mm *Repeat positioning accuracy: ±0.1mm.
Main product applications: commercial robots, teaching robots (teaching robots for universities, middle schools, and elementary schools), collaborative six-axis robots, photography and video robots, beauty and body robots, milk tea robots, auto parts, elevator parts, auto parts inspection tools, precision hardware, medical equipment accessories, etc. .

Backpack-mounted AMR Mobile Robot: Category: Logistics and Warehousing AMR/AGV Equipment Industry: Handling/Loading/Unloading | Other Wheel System: Mecanum Wheels Load Capacity: 20-30 tons Navigation Method: Laser Navigation.

Metal laser cleaning machine, also known as metal laser derusting machine, is a handheld laser cleaning equipment and a new type of high-tech machine for surface cleaning. It can work without chemical reagents, medium dust and water.

ROKAE CR18 — 18kg, 6-Axis, 1062mm Payload 18kg Reach 1062mm DOF 6-Axis IP IP67 Brand: ROKAE | Partner: TROY Supply

Smart AMR Forklift: The intelligent forklift series products are equipped with SRC core controller and use laser SLAM navigation, no reflector, the whole vehicle is equipped with 360° safety protection, which can meet Loading and unloading, sorting, handling, high shelf stacking, cage stacking, pallet stacking, etc. Scenario requirements, this series of products have rich models and a wide range of loads, such as pallets, materials. The handling of cages and racks provides a powerful solution.
The 6 axis robot Support PC, mobile phone, teach pendant, voice, APP, and other intelligent interactive control methods.

Easy to operate: Force-free teching effectively reducesdebagging time and learning cost.Portable PC,friendly man-machine operation interfacemakes the robot easier to use. Modularity: All-in-one module of reducer,motor,encoderand drive,which is convenient for quickdisassembly. Quick deployment: 10kg in rated load with 36kg in weight.Light-weight installation and flexible deployment.

Features of the four-wheel independent steering Inspection Robot: Four-wheel independent steering drive, with shock absorption, sufficient power Equipped with "eye robot positioning and navigation system" Strong obstacle crossing ability, can flexibly avoid obstacles and road collapse or holes, pits, etc., and adapt to various complex road conditions. With lifting rod, the lifting range is 1054-1634mm. Hardware resources: ultrasonic, laser radar, depth camera, visible light camera, thermal imager, temperature and humidity sensor, noise sensor, etc. Supports multiple modes such as automatic inspection and remote control function.

Physical safety system: Far-field protection: ØFar-field 360° 150m instant mapping, real-time positioning, navigation ability Near-field Protection: ØNear-field 360° safety protection: Ø6m 360° ToF camera day and night obstacle avoidance Ø6m ultrasonic fusion human monitoring, glass anti-collision ØBelow 5cm protection of 3m small dot pitch infrared laser array ØAnti-fall and mechanical edge contact

Flexible Manufacturing AI Robot: Designed for flexible intelligent manufacturing scenarios, it has multiple capabilities such as grabbing, placing, transporting, and plugging. It has self-developed intelligent algorithms, and open interfaces and tools to facilitate secondary development. TR-A2's operating skills can be continuously optimized through data accumulation, and the more it is used, the smarter it becomes, and the more efficient it becomes.

A professional design, manufacture all kinds of gloves equipment production enterprise, its excellent product quality and first-class service to win the customer high praise and recognition. Brings together various excellent equipment research and development personnel and chemical formula of talent, and with a number of well-known domestic and foreign manufacturers, companies, universities and research institutions established long-term strategic partnership, committed to the mechanical equipment frontier technology research and development of new products.

Product Description: The TR-1500V20 stringing machine is an automatic equipment that welds the well-tested cells into strings through interconnection bars, and sorts and collects the welded battery strings. The equipment adopts various advanced automation technologies such as PLC and servo to realize fully automatic processing from battery chip feeding to battery string discharge.

CNC Machine of Main Parts by: *The body weight is 855kg. *Mitsubishi M80 system. *11KW10000 rpm. *24 arm magazines. *X35MM YZ45MM *Japan THK roller guide Z axis 6 sliders

Water jet cleaning robot TRWJR-HM_V series: The ship rust removal robot is an automated equipment, mainly used for rust removal on the surface of large steel structures such as ships. This robot combines ultra-high pressure water jet technology, magnetic adsorption and wall climbing robot technology to achieve efficient and environmentally friendly rust removal operations. At the same time, it combines vacuum recovery technology to achieve wastewater recovery, reduce the discharge of paint residue and rust residue wastewater, and achieve environmental protection purposes. The application of this robot not only improves the efficiency of rust removal work, but also greatly reduces the potential risks to the environment and the health of operators, showing its important role in modern industrial maintenance.

Anti-interference positioning technology: Relying on the team's 20 years of experience in building the Beidou Satellite (GNSS) system and the application accumulation of the new generation of information technology, the anti-interference positioning technology produces a series of chips/boards/modules with the advantages of full self-development, domestic production, high integration and high anti-interference.

Industrial Delta Spider Robot: 400mm-1200mm working diameter 1-3kg rated payload KEBA teach pendant

Entry-level mobile robot controller: SRC-880. The most cost-effective AMR controller, the best partner for differential AMR.

Three-wheeled Electric Forklift Introduction: 3 wheeled forklift is designed to lift standard pallet with 1200 kg load capacity and 3880 mm lifting height. Three Wheeled Forklift is an ideal facility to load/unload goods in stacking warehouses, super-market, workshops, production lines or handle goods on/off trucks, containers, etc

Product Name: Industrial refrigerators and freezers Types: Refrigeration equipment for cold storage Model number: TR-HTBX120 Uses: This product is suitable for low-temperature freezing test of materials. Dimesion: 590*800*600 Unit weight: 50.0 kg OEM available!

Intelligent Bionic Robotic Hand features: ● Bionic design with exquisite appearance ● Five fingers are driven by independent linear motors, free and reliable ● The thumb side is adjustable to the palm, and the palm position is automatically sensed ● Silicone elastic fingertips and half-palm gloves ● Passive wrist rotation

Full body Exoskeleton Robot TR1 features: Height: 190cm; Free Axis: 27; Six-axis force sensor: 4-8pc; N.W. 120kg; Battery life: 2 hours; End Maximum Load capacity: 40kg; Chip computing power: 275 TPOS.

1. The motherboard has 3188 games built in, including 100+ 3D games 2. The memory card is 32G, running with 4 cores without freezing or crashing 3. Support to pause the game midway 4. Quick search game function 5. Support 4 handles online 6. Button custom sorting 7. HD LCD screen 8. Support multi-language switching

Terminator humanoid AI Robot TR-T800 Size Specifications: Height: 173 cm Weight (including battery): 75 kg Total Degrees of Freedom (excluding dexterity hand): 29 Single Hand Degrees of Freedom: 7 Lower Leg + Thigh Length: 91 cm Arm Length: 60 cm Neck Degrees of Freedom: 2 Single Leg Degrees of Freedom: 6 Waist Degrees of Freedom: 1 Single Arm Degrees of Freedom: 7

Laser Cutting Machine Advantages: System intelligent alarm Multi-directional abnormal alarm of equipment is directly communicated to the panel, so that equipment failures are known in advance, hidden dangers are reduced, and the efficiency of equipment abnormality investigation is doubled

The unmanned tractor adopts multi-sensor fusion SLAM technology such as laser, vision, and satellite inertial sensing, and uses trailer transport equipment to independently complete the transfer of goods, covering different indoor and outdoor working environments, and comprehensively improving the capacity and efficiency of internal logistics in the factory.

ROKAE CR20 — 20kg, 6-Axis, 1798mm Payload 20kg Reach 1798mm DOF 6 IP IP67 Brand: ROKAE | Partner: TROY Supply

Auto Foldable Scooter Features: 1. Unique remote control folding design, easy to carry and storage. 2. Electromagnetic brake system ensures safety. 3. Aluminum alloy frame for light weight and strength. 4. 3 folding methods: Remote control/Manual/Electric switch. 5. Equipped with high quality detachable lithium battery. 6. LCD display, power, speed display at a glance.

Household latex gloves production line: The Latex/Nitrile rubber solution of the household glove dipping machine is fed from the top of the distillation tower, and is distilled by steam heating. Dipping household latex gloves manufacturing equipment adopts the advanced technology and process formula design of Japanese and Korean cashmere glove production lines. The equipment structure is reasonable and suitable for various formulas.

Industrial Delta Spider Robot: 400mm-1200mm working diameter 1-3kg rated payload KEBA teach pendant
Applications include CNC machining centers, CMM measurement centers, CNC lathes, wire cutting, milling machines, grinders and other equipment, and can be used with various surface treatments according to customer requirements.

Single side grinding/polishing machine: Name: Single-sided copper plate polishing machine TR-ES50B Machine size: Length 2450㎜×Width 1721㎜×Height 2900㎜ Machine weight: 7500KG.

900CC Awsome Street motorcycle MV900S is coming soon ! Looking for global dealers from worldwide !

ADT-8960 is 6 axis PCI control card, it can support random 2,3,4,6 axes linear interpolation.And adopt advance technology, the frequency error is less than 0.1%.

[Applications in the Food Industry] Delta Robot technology allows for the fastest rapid grabbing and placement of loose, bagged, boxed, and canned products onto designated conveyor belts or packaging boxes. This enables food sorting, packaging, handling, and arrangement, minimizing manual contact during production and standardizing and automating the manufacturing process for high-efficiency control.

The Aerial Shuttle is a new IoT-based aerial logistics system. It consists of intelligent scheduling and monitoring software, standard track components, intelligent rail trolleys, and track switching. The entire system utilizes a modular design, allowing the planning and design of each unit to be combined to create a customized logistics system that meets the needs of customers and on-site construction.

TRL series robot stacking unmanned forklift application scenarios: factories, warehousing, workshops, logistics, etc. Mainly used for pile height.

TR20 Cobot Features: Platform-based products with powerful, scalable and sustainable capabilities help customers connect key nodes, empower integrators and end users, break through the limits of intelligent and flexible robot applications in various scenarios, achieve deep integration with scenario applications, and solve non-standard and Flexible pain points reduce the usage threshold for industry customers. Payload: 20kg. Working radius: 1854mm Repeat positioning accuracy: ±0.1mm

Robotic Exoskeleton Features: Through the support of the exoskeleton robot, the moment generated when the human body bends forward and leans forward is offset by the action of the thighs and buttocks, so as to relieve the stress on the waist, reduce fatigue and protect the spine.

The SCARA multi-joint manipulator belongs to the company's high-precision, high-speed, and high-performance robots. This product is mainly aimed at the application of robot lock screws in the 3C industry. This product is developed based on the previously developed SCARA robot body with 600 arm lengths. A special non-standard robot for locking screws with visual positioning function.

Mode: TR-ARG02 Specifications: CPU: Four core CPU / RAM:2G / ROM:32G Operating System: Android 9.0 Optical unit: Dual eye single green Micro LED screen Lens: Diffraction waveguide lens Resolution: 640x480 Physical buttons: power button, function button, return button Microphone: 5-micron array Interaction method: Touch control, phone Bluetooth control, ring control Speaker: Dual directional speaker with leak proof and privacy design Indicator light: Three color LED Weight: 61g; Battery: 440mAh; Interface: Type-C.

M820 series product feature: *50% reduction in volume and wiring time *30% energy savings *3.2kHz response speed

Inspection four-legged robot dog applications: Facing the application requirements in complex and dangerous environments, it provides intelligent solutions for application scenarios such as firefighting and rescue, anti-terrorism, and anti-explosion.

Six degrees of freedom, weight 13kg, load 3kg Working radius 624mm Repeat positioning accuracy ±0.03mm Maximum speed 2.0 m/s Typical power 150W Protection grade IP54

Robot Features: Large working space High repeat positioning accuracy Stable performance Run fast Good general performance Modular mechanical structure design

Sustainable Environmental Protection Concept: *The body adopts aluminum alloy skeleton *Significantly reduce the use of steel in the production process and indirectly improve the level of environmental protection *At the same time, compared with traditional diesel commercial vehicles, 50% emission reduction in the entire life cycle of pure electric mobile platforms

Our manufacturer's research and development, design and produce machines of gloves,balloon and condom. Mainly in balloon printing machine,production line for glove,glove half-full dipping,latex condom dipping and latex balloon dipping,glove dotting and printing machine, surgical glove out wrap/inner paper packing machine,condom packing machine and other relevant supporting equipment products.
Universal Industrial Robot-UIR series robot is introduced for picking and placing, CNC machine feeding, spray and drilling applications !

Cartoning machine, unpacking machine, cartoning machine, carton sealing machine, sealing machine, palletizer, strapping machine, film wrapping machine and assembly line whole plant packaging scheme customization, which can be applied to: food, daily necessities, cosmetics, toys, electronics, Chemical and pharmaceutical, stationery, building materials, hardware and other industries. All series of products are sold all over the country and exported to America, Europe, South Africa, the Middle East, Australia

The main body of the space capsule adopts a hot-dip galvanized structural frame and a fluorocarbon painted aluminum alloy aviation aluminum shell. It uses classic colors to enhance the visual effect. The geometric language is clear and neat, and the graphic design layout has a smooth curved appearance and reasonable functions. It can be customized with a viewing balcony for close contact. Nature, the interior of the space capsule has the characteristics of large space comfort, large-view panoramic skylights, and spatial extensibility. The overall frame streamline is simple and clear, the layout is traditional and efficient, and it can adapt to a wide range of scenarios.

The system of latex balloon dipping machine realized communication controlled by humanity-machine interface. They raise the digitized level of the system having it steady. Industry level modularization design, simple humanity-machine dialog and main speed and every section temperature can be shown in the screen.

Laser SLAM Small Stacker Automatic Forklift TR-CDD14: SRC-based laser SLAM small stacker automatic forklift, equipped with SRC series core controller inside; using laser SLAM navigation, no reflector, easy to deploy; pallet identification, accurate forklift; flexible scheduling, can be seamlessly connected to the scheduling system ;Slim body, small turning radius, suitable for narrow channel applications; 360° three-dimensional safety protection with 3D obstacle avoidance, safety touch and other sensors, which is the only one for the handling, stacking, stacking and other work requirements of Sichuan-shaped pallets choice.

Robot arm Applications: ——Material handling and palletizing Greater flexibility, more stable performance, and lower energy consumption; Maximum throughput with high-speed performance; Long working time; Fixed automation

Product Features 1. The cold generation aerosol generator is used to generate continuous and stable aerosol particles, and the filling of the aerosol is simple and convenient. 2. Use two sets of high-precision aerosol particle detection sensors to measure the upper and lower chambers simultaneously. 3. Configure the salt particulate aerosol generator. 4. Equipped with aerosol particulate static neutralization device. 5. Configure high-precision digital gas flow sensor to accurately measure gas flow. 6. Configure industrial-grade temperature and humidity sensors to accurately measure the ambient temperature and humidity in real time. (Test condition: 25 ± 5 ℃ 30 ±10% RH) 7. 10 inch touch screen, the operation is simple and clear. 8. Pneumatic fixture, easy to change samples. 9. Pumping and exhausting integrated silent vacuum pump, no external air source needed. 10. High-precision pressure gauge and flow regulating valve can adjust aerosol concentration. 11. Micro printer can print detection data. 12. Intelligent configuration such as leakage protection, overload protection, power-off preservation, etc., effectively protect the safety of use. 13. Special test software can be connected to the computer.

Plug-in machine Features: Mechanical fixing of substrate + visual positioning of Mark points, high precision Fast line change, fast speed, corresponding to various materials Flexible and independent Feeder, strong versatility, easy to replace It can automatically feed components in four packaging methods: bulk, tape, tube, and tray Different corresponding plans can be made according to different customers to meet the requirements of different customers.

Equipment Principle: The galvanometer laser welding machine is a perfect combination of the galvanometer motion system and the laser welding machine system. The laser realizes the rapid movement of the laser spot through the oscillation of the galvanometer, so it can achieve high speed of any graphics on the welding plane within the welding range High-precision spot welding and continuous welding.

Applications: ——Material handling and palletizing Greater flexibility, more stable performance, and lower energy consumption; Maximum throughput with high-speed performance; Long working time; Fixed automation.

The TR-BOTRH/LH series of dexterous hands have strong gripping force and moderate speed, and are suitable for grasping operations of robots or prosthetics. Supports ROS and provides ROS plug-ins.

SRC-based laser SLAM stacker automatic forklift TR-FL200, equipped with SRC series core controller, can identify pallets, fork goods accurately, and operate efficiently; and adopts laser SLAM navigation, no reflector, easy to deploy; fuselage 360 °Comprehensive protection + 3D obstacle avoidance to improve the safety of robot operations; the lifting height can be customized, supporting a maximum lift of 6M, which is a "stacking weapon" in the factory; the maximum load is up to 2000kg, suitable for large factories or warehouses. Load handling, stacking and palletizing scenarios
AMR Car Parking Robot effectively terminates the carbon emission of cars in the parking lot, provides low-cost green incremental parking spaces for the society, brings "no pollution, zero waiting" car service to users, and saves construction cost and operating cost for investors. The solution is widely used in static traffic areas where parking spaces are scarce, such as commercial office areas, airports, high-speed rail stations, hospitals, and residential areas.

TR-M630/10 transformer model features: A 630kVA oil-immersed transformer, has become a classic choice in medium and low voltage power distribution due to its high cost-effectiveness, reliable performance, and maintenance-free operation. If you are looking for an economical, practical, stable, and durable power distribution solution, the TR series is a wise choice.

Component Insertion Machine Advantage analysis: 1. Replacement of human work 2. Theoretical speed 24,000 points/h 3. Simple operation, high stability 4. Flexible deployment of production 5, low maintenance cost

Rehabilitation Exoskeleton Robot: It can provide the most realistic walking gait, suitable for many diseases (including stroke, paraplegia, and other lower limb weakness disorders, with low requirements for upper limb strength), wear quickly, and electrically adjust leg length!

Jaka cobot Features: JAKA Zu 18 collaborative robot has a dead weight of 35kg, a load of 18kg, and a working radius of 1073mm; Integrated joint design, easy to assemble and disassemble; High load, high cost performance, and high collaboration security; There is no need to install safety fences and it can work harmoniously with people, robots and the surrounding environment. Recommended industries and applications: Automobile manufacturing, metal processing, injection molding, pharmaceutical and chemical industry.

The lower limb exoskeleton Robot: The 12-degree-of-freedom lower limb power-assisted exoskeleton robot is fully electrically driven and can run for 5 hours without restrictions. Wearing it can easily carry 50kg and walk.

Online thermal imaging camera: TR-460TC is a high-performance, high-precision network-based thermal imager that uses an uncooled infrared focal plane array detector. Multiple lenses are available, providing clear and accurate infrared images and temperature measurement capabilities. TR-460TC supports various communication protocols including Modbus TCP, ONVIF, and GB28181, and comes with professional infrared temperature analysis software and SDK. Its small size and low power consumption facilitate system integration in machine vision, power, rail transportation, and industrial automation applications.

High speed and Reliable Delta Robots supply. It's build up with panasonic servos. Supports vision camera on production lines

Navigation method: Magnetic navigation, Magnetic stripe Control method: Integrated controller Motor: Brushless motor, ≤200W / set Drive method: Differential drive Load method: Latency AGV

Mobile Robot Platform parameters: Curb weight: 70KG Max payload: 80KG Geometric size: 974.16*782.02*364 (mm) The fastest speed: 7.2km/hour Obstacle surmounting ability: 130mm Motor parameters: 4*400W brushless servo motor Communication interface: CAN/232 serial port Climbing angle: <30° Turning radius: 360° in place Battery: 48V30AH lithium battery

Model: TVN-SmartGo Type: Smart Vision Inspection Camera Resolution: 1600 x 1400 Frame rate: Color/Black and White Network interface: 100Mbps Video interface: HDMI IO interface: IO interface, RS232, power interface USB interface: 2 Storage method: U disk storage

Drones are widely used in civil, police, urban management, agriculture, geology, meteorology, electric power, rescue and disaster relief, video shooting and other industries. Drone have realized electronic, informatized, and intelligent inspections, improving the efficiency of power line inspections, the level of emergency rescue and the reliability of power supply. In emergency situations such as flash floods and earthquake disasters, drones can conduct surveys and emergency investigations on potential hazards of the line, such as the collapse of the tower base, without being affected by the road conditions at all, and it is not necessary to climb the tower. It can also survey the blind corners of the human eye, which is very helpful to quickly restore power.

Automatic Strapping Machine Features: The automatic strapping machine has the advantages of high mechanical manufacturing precision, rigorous structure, firm packing, fast speed, low failure rate, and long life. It can be used in conjunction with an assembly line to realize automatic packing.

SE01 overcomes the natural gait problem that has long restricted the development of humanoid robots. In many people's impressions, robots often give people the impression of "broken steps, bent legs, and chopping feet" due to technical deficiencies, but SE01 completely subverts this stereotype, allowing robots to walk freely with a steady, fast and smooth pace. SE01 can show unprecedented elegance and energy saving in both static and moving states, thus greatly shortening the behavioral performance gap between robots and humans.

Spiral Conveyor Applications: Such as food mesh belt; food cleaning conveyor chain plate; B-shaped mesh belt for chocolate coating machine. At the same time, it produces biscuit machinery, imported machines, ultra-thin energy-saving mesh belt, steamed mesh belt, frying box, drying hanging box etc.

All-round AI Robot, defining a new level of operation: Faster, smoother, and safer, TR-S1 pioneered an AI-oriented integrated hardware and software system architecture. Deeply coupling "AI intelligence" with "strongest operation", it can learn, think, and work like a human, and interact with people safely and intelligently.

JAKA Zu 5 collaborative Robot features: Compact and light: dead weight 23kg, load 5kg, working radius reaches 954mm; High flexibility: rapid deployment can save employees’ working time and optimize overall productivity; Strong adaptability: meet the needs of lightweight operations, such as loading and unloading, testing, assembly, etc. Recommended industries and applications: 3C electronics, precision manufacturing, education, services

Killerbody Bumblebee Helmet features: Unit weight: 1.8kg Product volume: 38cm * 38cm * 38cm Material: ABS Function: music/voice, deformation switching, bluetooth audio Origin: Mainland China Brand: killerbody Product Category: Transformers Control method: voice control Whether electric: yes Power supply mode: battery Packing: color box Anime Character: Bumblebee

AMR Forklift Specifications: Rated Load Capacity (kg) 2000 Combined Endurance (h) 6-8 Standard Lift Height (mm) 3000 Travel Speed: Fully Loaded/Unloaded (m/s) 1.5 Minimum Turning Radius (mm) 1577 Positioning Accuracy (mm, °C) ±10mm ±1

TR-LLE001A also provides a fitness mode, which intelligently provides reverse leg-lifting resistance and leg-pushing resistance, accurately and efficiently training the user's walking core muscle groups while walking, achieving fitness and body shaping effects.

ROKAE CR35-35C xMate Collaborative Robot — 35kg, 6-Axis, 2246mm Reach Product Overview The ROKAE CR35-35C is a next-generation heavy-duty 6-axis collaborative robot designed for maximum payload applications. With 35kg capacity and an extended 2246mm reach, it delivers exceptional performance for demanding industrial automation tasks. Key Specifications Payload 35 kg Reach 2246 mm DOF 6-Axis IP Rating IP67 Controller xMate Control Cabinet (MCC) Advanced Features Force sensing with joint torque sensors 21+ TÜV functional safety features Direct teaching with 1N force Graphical flowchart programming Rokae Studio offline simulation Control-cabinet-less design option available Applications Heavy palletizing, large machinery tending, large-scale assembly, logistics automation, construction material handling. Why TROY Supply? As an authorized ROKAE partner, TROY Supply provides factory-direct competitive pricing, professional global technical support, on-site installation and training, and comprehensive after-sales service. Contact us for a customized solution and quotation. Brand: ROKAE | Technical Partner: TROY Supply | Made in China

From 500kg, 1Ton to 40 Ton Payload 6 feet steward Robots are available !

Horizontal Automatic Insertion Machine Advantage analysis: 1. Replacement of human work 2. Theoretical speed of 24,000 points/h 3. Simple operation, high stability 4. Flexible deployment of production 5, low maintenance cost

The MOD mobile collaborative robot itself is an operator that can move autonomously, Timely complete the tasks of multiple different stations in the production line. Using Mecanum wheel drive mode, Realize 360° movement in any direction, and can work flexibly in a small working space, effectively Improve site utilization and production efficiency. By matching rich end-fixtures and visual knowledge Different equipment, which can realize grasping, assembly, sorting, loading and unloading, moving, handling, vision Detection and other functions are more accurate, stable and efficient. Two-arm bionic design, more Close to human operation mode, suitable for a variety of typical work stations that require both hands at the same time.

Solar Battery Power Bank features: Category: Solar Power Bank Brand: OEM Battery type: soft pack Cell type: polymer lithium ion battery Shell material: plastic Function: Solar Color: orange, blue, green, black Power capacity: 99000mA Conversion rate: 90 (%) Charging power: 5W
Baby Diaper machine Standard specification: 380x280 420x320 480x320 520x340; *PLC control system,Operating on the touch screen,Configure HDTV monitor; *Germany BST automatic web guide system (optional).

3D Holographic Girlfriend Specification: Model: TR-AIEra Brand: ODM Material: Alloy Color Classification: Golden Exclusive Edition Compatible platform: ANDROID iOS Smart type: AI virtual girlfriend Power W: 15 W Product net weight (kg): 2.1 kg Product size (mm): 265x265x160 mm Smart warranty period: 12 months

Tandem Press Line Description: 1. The use of frequency conversion speed regulation can flexibly match the production speed. 2. Two optional modes: continuous conveying mode and step conveying mode. 3. The production line can be stopped through the conveyor line, which is convenient for customers to use. 4. The belt is made of wear-resistant material.

This machine is a fully automatic one-to-one KF94 (willow-leaf, fish-shaped) mask machine; the loading rack is connected with a main body machine and an ear strap welding machine; the loading rack is responsible for installing and conveying fabrics, and the main body machine is responsible for The mask body is formed and welded, and the earband machine is responsible for welding the earband. The whole line adopts PLC, touch screen control, the main conveyor belt adopts single-phase motor conveying, stepping motor turns the film, precise transmission, stable control, and adjustable speed. The welding adopts ultrasonic, which is stable and efficient.

ROKAE CR20-25C-5 — 25kg, 5-Axis, 1798mm Payload 25kg Reach 1798mm DOF 5-Axis Brand: ROKAE | Partner: TROY Supply

The MOD mobile collaborative robot itself is an operator that can move autonomously. Timely complete the tasks of multiple different stations in the production line. Using Mecanum wheel drive mode. Realize 360° movement in any direction, and can work flexibly in a small working space, effectively Improve site utilization and production efficiency. By matching rich end-fixtures and visual knowledge Different equipment, which can realize grasping, assembly, sorting, loading and unloading, moving, handling, vision Detection and other functions are more accurate, stable and efficient. Two-arm bionic design, more close to human operation mode, suitable for a variety of typical work stations that require both hands at the same time.

We are a leader in intelligent innovation technology and application, and is the first in China to realize fully autonomous inspection of substations by quadruped Robots.Our independently developed quadruped robot dog has been put into use in power stations, factories, pipeline inspections, emergency rescue, fire investigation, future scientific research and other application environments. It has served the Asian Games in underground pipelines, participated in the Singapore National Grid project, and participated in emergency missions, earthquake relief, and explosion reconnaissance exercises. We are currently conducting long-term and in-depth cooperation with industry giants such as State Grid, China Southern Power Grid, Baosteel Co., Ltd., and Fluke.

32-line mechanical laser radar: 360° three-dimensional precise perception Highly integrated modular design gives you more stable and reliable performance guarantee

*Multi-degree of freedom bionic arm *Voice interaction + face recognition *Developer Eco + Extension Interface *3D SLAM indoor construction map navigation *Omni-directional obstacle avoidance strategy

AUBO-i5FB collaborative robot can meet the needs of lightweight operations. Payload 5kg, Max. length 1008mm, Max. Reach 886.5mm. Wide application range, rich configuration, the end can realize ±360°rotation.

Bulletproof glass can be approved from the weapon model below: 1, M14 Automatic Rifle / 7.62mm NATO bullet 2, F56 submachine gun / 7.62mm steel core bullet 3, F79 light submachine gun / 7.62mm steel core bullet 4, F54 pistol / 7.62mm steel core bullet

AM400 series medium-sized PLC Product performance: Built-in EtherCAT bus *Can bring 4 or 8 servo axes (am401 can bring 4 axes, AM402 can bring 8 axes), support synchronous positioning, electronic cam, interpolation function. *Can expand 125 racks at the same time, can expand 32000 IO points.

Similar your real girlfriend Customized body shape, face appearance and eye color options etc. Warm Body function Fluently English and Chinese speaking

*User-friendly open tray design, bringing enjoyable dining experiences. *21 inch high-definition advertising display, expanding marketing possibilities. *Dynamic lifelike interaction, sensory communication. *CADEBOT: a multi-scenario comprehensive commercial delivery Robot.

Similar your real girlfriend Customized body shape, face appearance and eye color options etc. Warm Body function Fluently English and Chinese speaking

Unmanned Forklift TR-TF2000A: Unmanned counterbalanced forklift is based on a positioning and navigation system that integrates multiple sensors such as multi-line lidar, RTK, and inertial navigation. It can provide an overall solution for unmanned cargo forking, multi-machine scheduling, and logistics automation, and can identify and locate pallets, cargo, production lines, etc. in complex scenarios, thereby performing precise forking and handling operations.

SAR130 is a 4-axis vertical multi-joint robot with an effective punching load of 130KG. It can adapt to a variety of different application scenarios, and can customize five or six axes according to customer needs. The SAR130 product is easy to understand and has a solid structure to meet the requirements of customers for product diversification, high efficiency, and product production.

ROKAE CR12 — 12kg, 6-Axis, 1434mm Payload 12kg Reach 1434mm DOF 6-Axis IP IP67 Brand: ROKAE | Partner: TROY Supply

Universal industrial robot is flexible for all kind of applications at the ending of factory. Such as picking and placing, polishing, drilling and spraying etc.

Power phase number: single phase Rated power: 20W Moisture-proof way: open Cooling method: oil-immersed air-cooled Cooling form: liquid/oil immersed Frequency characteristics: low frequency Brand: OEM Winding form: double winding Core form: shell/core shape

Production Model: Fish style. Speed: 80-100pc/min Rate of defect prodcution: Less than 4% Face mask for Adult Size.

High Speed Round Printing Machine applications: For Barrel, Plastic cup, and round shape items. Over 1000pc/minute.

Coffee Maker Robot Features: Customer selects the coffee drink on the touch screen, and submits the order after the selection. Our Coffee Cobot system immediately receives the order information, and the Coffee Robot starts making coffee according to the order information.

Rotary Jacking AMR Robot: AMB-800K: AMB-800K rotary jacking robot is equipped with a SRC-800 series controller inside, has an ultra-low chassis, can drill into the shelf for jacking and handling, and has a load of up to 800kg. It can control the rotation of the robot body and the steering of the jacked goods. It supports pure laser SLAM navigation and QR code soft navigation, which can realize flexible transportation of goods between designated locations, such as e-commerce sorting, material transfer, call delivery, etc., liberating manpower and realizing unmanned transportation.

Compound Hunting BOW PARAMETER: Right handed, IBO 320fps; Axle-to-Axle: 31"; Draw weight: 19-70lbs, Draw length: 19”-30” adjustable,without bow press, Brace height: 7”, Let-off: 80%, Bow weight: 3.95lb

Jumping stilts is defined mainly by a flat spring controlled upon deformation, so that the result is a straight movement relative to the ground. Main material: Aluminum alloy, Engineering plastic Spring: Fiberglass;

6 Axis Robot is designed for Spraying purpose. Full spray package can be provided to our users.

*Robot advantages: fast speed, high precision *Long service life and stable performance *Strong compatibility and strong flexibility *Simple control and ease of use

Capacity: 40-50pcs/min Power: about 11kw Weight: about 2000Kg Product size error: ±1mm (excluding raw material error)

Dimensions: 1336*1296*1218 Model: XSJ11A Production capacity: 3600/hour Output: 120kg/hour Rated Power: 4.7KW Power Source: 220V 50Hz(1P)

Application for assembly: Greater flexibility, more stable performance, and lower energy consumption; Maximum throughput with high-speed performance; Long working time; Fixed automation;

Tracked drainage and water supply Robot: Drainage and water supply robot is mainly used for flood drainage and rescue in limited urban spaces, such as underground parking lots, underground shopping malls, basements of residential buildings, subway stations, tunnels, culverts and underpasses.

TR-G30 Collaborative Robot: TR-G30 Cobot model is a large Collaborative Robot, is mainly used in machine tool loading and unloading, palletizing, assembly and large load handling. Repeat positioning accuracy ±0.05mm, meeting the needs of higher load industrial scenarios!

4 Axis Industrial Robots are designed for punching machine, CNC machine feeding applications. OEM customers are more than welcome !

Installations: Greater flexibility, more stable performance, and lower energy consumption; Maximum throughput with high-speed performance; Long working time; Fixed automation; Robot Applications: Such as Grinding and polishing, Cutting, grinding, deburring, cleaning, polishing, water cutting and other processing functions.

Terminator 2 Model T800 Red light of eyes T2 collection No removal chip in the head !

Motor Power: 3000W/5000W/7000W Curb Weight: 169KG Battery Type: Lead-acid/Lithium-ion Gross Weight: 150kg+ (subject to battery specifications) Battery Capacity: 60A/80A/100A/120A, etc. Length: 2105mm Speed: 70-135km/h Frame: Electric Pulse Frame Wheel Hubs: Aluminum Alloy Body Color: Multiple Colors Available Tires: Anti-slip, Wear-resistant Tubeless Tires Braking System: Front and Rear Disc Brakes Front Tire Size: 110/70-17 Shell Material: ABS/PP Rear Tire Size: 180/55-17

TIG welding robot is designed for thin metal sheet such as alumium or thin steel.

Firefighting Robot TR-M4DA: The high-temperature-resistant firefighting robot adopts a number of high-temperature-resistant patented technologies, giving the robot the ability to continuously work in a high-temperature environment of 1000°C for more than 30 minutes. It can replace fire fighters who go deep into dangerous high-temperature fires for long periods of time to conduct fire reconnaissance and fire-fighting work. It is extremely The earth has expanded the combat scope and capabilities of fire rescue personnel.
Main Products: Commercial robots, teaching robots (teaching robots for universities, middle schools and elementary schools), collaborative six-axis robots, photography and video robots, beauty and body robots, milk tea robots, auto parts, elevator parts, auto parts inspection tools, precision hardware, medical equipment accessories etc.

*Pure water production capacity: 4T/H *Length of drying tunnel: 15M * Oven temperature: up to 140℃ * Heating power: three-phase 380V * Control power supply: single-phase 220V * Mechanical speed: 5-20m/min * Installed capacity: 400KW

Oxygen Machine Specification: Customize Production: Yes Extraction Gas type: Oxygen Workign Principle: Compression Processing capacity: 6.7 (m3/h) Dimensions: 355*275*370 (mm) Weight: 7.3-8.3 (kg)

Controller Battery: 3.7V 300mA Motor: 1806 brushless motor Item name: SJRC F11 RC brushless drone Charging time: About 3.5h Flight time: About 25 mins GPS/GLONASS double mode: YES 5G Wifi image transmission distance: 400-500m (Free interference and no occlusion) Camera: 90deg adjustable angle by remote controller

M800 series product feature: *50% reduction in volume and wiring time *30% energy savings *3.2kHz response speed

Daily capacity about 100,000 pcs Fully Automatic mask production line by 1 operator Easy HMI by English version

Quiet Industrial DC Fan features: *Copper wire motor *Super quiet bearing * Low power consumption and environmental protection * Flame retardant material

Carton transfer unit automation unmanned picking and handling lifting by CTU AMR Robot: 6 layers by 50kg payload each layer; Integrated control, efficient and easy to use !

Wall Printer Advantages: The wall painting machine uses unique environmentally friendly pigments, the colors are full and fresh, durable and waterproof. Wall creation does not require a hand-painted master, a picture can be customized, the computer is set up, the painting equipment is self-injected, everyone can operate it, save worry and effort, a large number of libraries as the manuscript, creative ideas, whatever you want, what you see.

MIG/TIG welding robot can be worked as radius on 1850mm, suitable for chairs or furnitures welding !

Easy to operate: Force-free techingeffectively reducesdebagging time and learning cost.PortablePC,friendly man-machine operation interfacemakes the robot easier to use. Modularity: All-in-one module of reducer,motor,encoderand drive,which is convenient for quickdisassembly. Quick deployment: 5kg in rated load with 18.5kg in weight.Light-weight installation and flexible deployment.

TR-R12 Collaborative Robot: Large collaborative robot, with standard industrial control cabinet, suitable for heavy object assembly, palletizing, loading and unloading and other applications. Repeatability accuracy ±0.03mm, absolute positioning accuracy ±0.5mm, meeting the needs of higher load industrial scenarios!

THE 4TH GENERATION of Robot Car Parking: The 4th generation of Parking Robot adopts the new patented design of center-positioned robot arms and differential driving units while the software and algorithm are also comprehensively optimized.In addition,Parking Robot has passed the acceptance test of CSEI (China Special Equipment Inspection And Research Institute),ensuring operation of robots in parking lots.

ABB KUKA Yaskawa Fanuc etc.. industrial Robot arm 4 axis and 6 axis 6kg to 2000kg payload Within 5 years old

ROKAE CR7 — 7kg, 6-Axis, 988mm Payload 7 kg Reach 988 mm DOF 6-Axis Repeatability ±0.02 mm IP Rating IP67 Applications Precision assembly, machine tending, lab automation. Brand: ROKAE | Partner: TROY Supply | Made in China

ADTECH 3-6 Axis dispensing control system for high-precision motion control system.

ROKAE CR12C xMate — 12kg, 6-Axis, 1434mm Payload 12kg Reach 1434mm DOF 6-Axis IP IP67 Features Force sensing, direct teaching, Rokae Studio simulation. Brand: ROKAE | Partner: TROY Supply

Collaborative Robot motor is specially designed by our company for the robot industry, power inspection robots, special robots, and bionic robots. The simple structural design of the collaborative robot motor is combined with the robot joints to achieve small size and high precision. It has superior low-speed performance, high power density, high response, and low torque fluctuation, which solves the vibration generated by robot joints when running at low speed. The performance of the collaborative robot motor produced by our company can replace similar products from a certain company in the United States.

TR-X9 is a fanless and full aluminum designed small PC equipped with 2 LAN and 2 HDMI ports. The new 2.5'' Hard Disk drawer design allows quicker re-configure SSD/HDD,and the optional Intel dual/quad core processor delivers high PC performance. TR-X9 is good choice for a PC using at home/ office, as well as a display terminal for commercial use.

Semi Automatic Taping Machine Applications: The trend of industrial automation requires SMT operations in the electronics industry, inductors, transformers, connectors, crystal oscillators, semiconductors, metal stamping iron sheets, various JACKs, ICs, USBs, energy inducers, antennas/reeds, switches, electric keys, switches, chargers, etc. The packaging methods of SMD patch electronic parts such as battery holders are all transferred to the carrier tape packaging. SMD semi-automatic packaging machines and automatic packaging machines are equipment that handle packaging operations well.

AM600 series medium-sized PLC Applicable industries: High-speed printing equipment, lithium battery winding, high-speed lamination, new energy industry multi-axis bus control production line, coating inspection, packaging, labeling, etc.

Composite Robot Features: *Omnidirectional operation Full-time and omnidirectional mobile operation, integrated coordinated motion control. *Hybrid navigation Supports switching between free navigation (AMR mode) and designated routes (AGV mode) between multiple points. *Hybrid targeting Dual radar fusion visual recognition positioning, docking accuracy +/-5mm, not affected by dynamic environment. *Man-machine operation It can recognize pedestrians and special scene markers, has 360-degree surrounding visual obstacle avoidance, and can safely detect the robot arm's working space to ensure safety. *Flexible scheduling It can be connected to a third-party dispatching system to perform multi-machine collaboration in mixed fields and support equipment linkage dispatch. *Jacking floor mats Lift anti-slip rubber floor mat to enhance parking stability by +/-0.5mm.

Laser SLAM rotary lifting AMR Robot TR-SW1500: Super strong load by 1500kg, smoothly AI transport.

Similar your real girlfriend Customized body shape, face appearance and eye color options etc. Warm Body function Fluently English and Chinese speaking

4 main Applications of Exoskeleton Robot Subjects: *Robot control *Human Factors Engineering *Biology *Rehabilitation medicine

TVN-3D9000 with 3D deep view measuring features: *High-quality optical system *HD lens *Multiple obiective selection *Stereoscopic 3d imaging *High-precision measurement *Quality assurance

Cobot CS63 Parameters: Six degrees of freedom, weight 14kg, load 3kg Working radius 624mm Repeat positioning accuracy ±0.02mm Maximum speed 2.0 m/s Typical power 150W Protection grade IP54

Automatic glove dipping line features: This machine by PLC program control with automatic and manual modes, its simple operation, small size, and use gloves Roller pull on gloves without any damage. Its normal use and low maintenance costs. Also without gas supply, the machine noise <40dB, safety, energy saving and environmental protection. because machine use full auto counting, which can reduce worker and can glove can be packed immediately, so can save 2-3 workers, which greatly improves production efficiency and reduce production costs, so that is ideal glove manufacturer selection.

OEM Electric mask: Power (W): 0.5W Voltage (V): 5V Power Source: Battery, usb, Electric Materials: PP and Silicone Function: Air purifier and anti-fog smoke virus

AGI Humanoid Robot Iron parameters: Height 178 cm and weighing 70 kg, it possesses 82 degrees of freedom, including 22 in its hands, and is equipped with a self-developed Turing AI chip boasting a computing power of 2250 TOPS.

Spot Welding Robot TR10210A-265 features: Rated Payload: 210kg. Working range: 2658mm. Number of control axes: 6 Repeat positioning accuracy: ±0.06mm. Installation method: Formal installation. Protection level (wrist): IP65.

The high configuration of our Delta Robot ensures with high performance and high cost performance: *By usingimported fromJapan's Panasonicservo motors. *by High precision planetary reducers. *Payload from 1kg to 15kg. *Working Diameter from 350mm-1400mm.

Palletizing Robot solutions for Heavy box: *300kg payload *3000mm working radius *0.03mm Repeat Accuracy *Yaskawa Servo system *LNC Robot control system

Robot Features: Large rotation degree, wide applicability Independent mold opening, aluminum profile molded structure, beautiful appearance Hand-held teaching programmer, programming is quick and easy Dispensing speed and glue amount can be set individually High-precision stepping motor control, precise dispensing track Can be used to dispense space points, lines, arcs, and other arbitrary shapes A variety of dispensing needles, syringes, dispensing valves and controllers to meet different needs
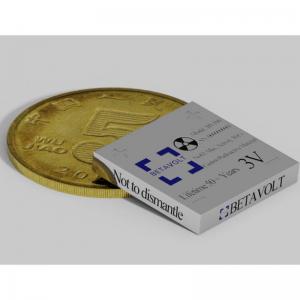
Atomic energy batteries can generate electricity stably and autonomously for 50 years without charging or maintenance. They have entered the pilot stage and will be put into mass production on the market. Betavolt atomic energy batteries can meet the needs of long-lasting power supply in multiple scenarios such as aerospace, AI equipment, medical equipment, MEMS systems, advanced sensors, small drones and micro robots. This new energy innovation will help China gain a leading edge in the new round of AI technological revolution.
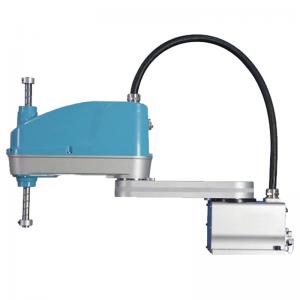
OEM Scara Robots are designed for the factory with electric components assembling such as Samsung, Foxconn, LG and Canon etc.

High precision desktop robot, soldering robot are designed for electric components production lines such as Samsung, LG, Foxconn and Canon etc.

AUBO-i5FB collaborative robot can meet the needs of lightweight operations. Payload 5kg, Max. length 1008mm, Max. Reach 886.5mm. Wide application range, rich configuration, the end can realize ±360°rotation.

We can fast supply the used LNG tanks to world wide! China Used LNG Tank supply from 30m³/50m³/60m³ etc. Since the year 2015/2016/2017...

Forestry RC Robot Application scenarios: It can be used to clear combustible materials under the forest, open forest fire isolation belts and fire trenches; remove weeds and open grassland fire isolation belts; clear weeds and shrubs on embankments and remove safety hazards in a timely manner; it can also be used to transport materials in mountain jungles, replacing manual transportation and improving firefighting efficiency.

AMR Car Parking Robot effectively terminates the carbon emission of cars in the parking lot, provides low-cost green incremental parking spaces for the society, brings "no pollution, zero waiting" car service to users, and saves construction cost and operating cost for investors. The solution is widely used in static traffic areas where parking spaces are scarce, such as commercial office areas, airports, high-speed rail stations, hospitals, and residential areas.

*Biochemical defense *Tear gas defense *COVID-19 defense by N95 filters *Environmental pollution prevention *Airborne infectious disease defense

Similar your real girlfriend Customized body shape, face appearance and eye color options etc. Warm Body function Fluently English and Chinese speaking

Dumpling Machine Specifications Dimension: 3400*2850*2000 Model: ZK-3-SJ Generation rate: 14000/hour Output: 280kg/hour Power: 12.9KW Power: 380V 50Hz(3P)
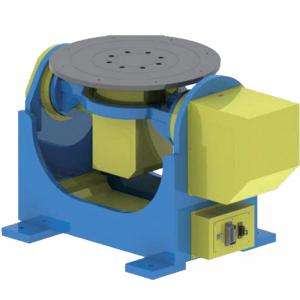
2 axis rotation table for welding Robots * Payload from 200kg to 1000kg * Table diameter from 400mm to 600mm * Can be customized.

* Delta robots are cost-effective, high-quality and low-cost, can be customized OEM design for customers, and support various visual sensor information; * TRD robot application system is mainly composed of three parts: robot, wire feeding and robot installation frame. The robot consists of a substrate, a motor cover, a rotating shaft, a main robot arm; it is composed of auxiliary mechanical arm and gripper center.

1. Application scenario: Automatic production of 4-6 layers folding masks. 2. Basic functions: A. Folding masks are produced by the whole machine in automatic assembly line. B. Automatically install the nose bridge, edge banding, forming and welding. C. Automatically printing logo, cutting ear straps, ultrasonic welding. D. Automatic folding, welding, cutting, leveling and shipping.

Equipment Fetures: * High Speed process up to 480pcs/min. * Large payload of Delta Robot by 6kg. * Smaller design than other famous brand.

Main business: a variety of high-strength chains; lifting machinery; conveying machinery; mine support products; crane parts and maintenance services Ship chain, green decoration chain, stainless steel chain, bucket elevator-hoist chain, chain hook, hopper, sprocket, plate chain and other accessories, conveying machinery-FU conveyor accessories, chain conveyor accessories, scrapers Plate conveyor accessories, slag conveyors, slag remover accessories, mine support-bolts, anchor plates, W steel belts, anchor cables, anchoring agents and other supporting products. The above products are used in: lifting, metallurgy, coal, petroleum, building materials, cement, electric power, chemical industry, shipbuilding, transportation and greening industries. Non-standard products can be customized according to user needs.

Sanitary Napkin production line: Customized specification; PLC control system,Operating on the touch screen, Configure HDTV monitor. Germany BST automatic web guide system (optional).

QS7AA020M AC Servo Driver is a new generation of general-purpose servo motor driver, which is optimized and improved on the basis of QS6 series servo driver. more stable and more convenient. More mature and stable, rich and complete information. The servo drivers add to 485 new communication functions, more convenient and reliable connection with the host computer or controller software.

We supply used Yamaha SMT machines We supply used Fuji SMT machines We supply used Panasonic SMT machines

Feeding → Screw Extrusion → Melt Filtration → Metering Output → Die Head Extrusion → Into the Spinneret → Hot Air Traction → Net Curtaining → Electret Processing → Rewinding

Application range: calcium carbonate crushing processing, gypsum powder processing, power plant desulfurization, non-metallic ore pulverizing, coal powder preparation, etc. Material: quartz, feldspar, calcite, talc, barite, fluorite, rare earth, marble, etc.
TRE5-8CO is a 6-axis vertical multi-joint Cobot with an effective load of 5KG. It can adapt to a variety of different application scenarios, and can customize five or six axes according to customer needs. TRE5-8CO Cobot is easy to understand and has a solid structure to meet the requirements of customers for product diversification, high efficiency, and product production.

Electron Microscope Model: TVN-9218/9118 features: Resolution: 1920 x 1080 Frame Rate: 60fps Optical Size: 1/3 inch Network Interface: None Video Interface: HDMI IO Interface: None USB Interface: 1 Storage Method: SD Card Storage

Amphibious UTV features: Hull material: fiberglass Model: TR-AUTV04 Specification: 1500cc Air pump: yes Maximum number of occupants: 2 Maximum load: 200kg

Palletizing Robot solutions for barreled water: *800kg payload *3000mm working radius *0.03mm Repeat Accuracy *Yaskawa Servo system *LNC Robot control system

Upper Exoskeleton Robot can be achieved: A healthy way of working for everyone, To reduce the burden and pressure caused by lifting work; What the exoskeleton was born for.

Desalination is the use of seawater desalination to produce fresh water. It is an open source incremental technology to realize the utilization of water resources. It can increase the total amount of fresh water without being affected by time, space and climate. The water quality is good and the price is gradually reasonable. It can guarantee the stable water supply such as drinking water for coastal residents and industrial boiler water supply. The process of obtaining fresh water from seawater is called desalination. The seawater desalination methods currently in use include seawater freezing, electrodialysis, distillation, and reverse osmosis. The current reverse osmosis method using reverse osmosis membranes quickly occupy the market due to its simple equipment, easy maintenance and modular equipment, and gradually replace it The distillation method has become the most widely used method.

10W Wireless cellphone charger; Alumium material, fast charge as same as by USB cable charging; Iphone, Samsong, Huawei, etc. more than 250 phone models can be supported. CE、FCC、RoHS Certifications.

Intelligent cruise explanation automatically leads the way: *Adopt advanced wireless laser navigation technology to quickly scan and build real-world maps. *Automatic cruise explanation, accurate location *Voice activation automatically leads the way to the designated location *More than 70% coverage area, panoramic road conditions, safe obstacle avoidance.

Fixed Wing Hybrid VTOL Drone main feature: ---HD photo and video evidence collection Equipped with an airborne camera, the UAV can collect evidence of illegal acts from the air to investigate the damaged area, and cooperate with the ground police force to search for the target.

Robot Features: Large working space Stable performance Run fast Good general performance Modular mechanical structure design

Electric Stand up Forklift Introduction: Stand up electric forklift is designed to lift standard pallet with 500kg load capacity and 2000mm lifting height. Electric Forklift is an ideal facility to load/unload goods in stacking warehouses, super-market, workshops, production lines or handle goods on/off trucks, containers, etc

All-terrain Inspection Robot: It realizes online autonomous 3D mapping in complex indoor and outdoor scenes, and is applied to firefighting, law enforcement, cases, coal mining, petrochemicals, security and other fields, including unmanned mapping services for application needs such as unmanned map construction and 3D reconstruction.

Industrial robot manufacturer in China with cheap price ADTECH FR5215 system 5500mm arm length 4 axis hoisting scara robot with AVS vision system. ADTECH is professional in 4-axis Scara robot R&D, producing and service. For reduce products people cost. More and more robot is used on production line.ADTECH scara robot can replace NACHI,TOSHIBA,etc. Japan brand, It is application for PCBA assembly,screwing loading,packing,etc electrical field.
Polished silicon wafer features: Diameter (mm): 200 Model: P, N Crystal orientation: <100>, <111>, <110> Strong processing capabilities and technological guarantees, and can provide products and services that meet customer needs according to customer needs or specific specifications.

The Inspection Robot uses highly intelligent robot technology and image recognition technology to replace the manual completion of the detection and diagnosis of the equipment operating status in a special environment, realize full coverage inspection of the equipment area, and have multiple functions such as security inspection, environmental monitoring, and smoke sensing. It can effectively reduce potential safety hazards such as fires and theft, alleviate the problem of weak staff on duty, and improve work efficiency.

Flying life buoy features: Maximum Speed: 14m/s Wind resistance: Level 7 Survival sea conditions: Level 2 IP Class: IP68 Flying Time: 10min Self Weight: 4.5kg Working Range: 1000m

The transmission line Inspection Robot uses a dual-spectral imaging unit, an edge computing module, and a high-precision positioning module to achieve remote monitoring of the operating status of important equipment, one-click arrival at key sites, intelligent perception of working conditions around sections, and defect alarms for infrastructure.

7 Inches color high-resolution screen display punching controller, display system information, rich interface can be made of parameter selection in both Chinese and English.

FPC Machine Model: TR-CA5252. Conventional FPC board/new energy FPC board, cover film, EMI, whole sheet to sheet, or sheet to roll.

The MOS mobile collaborative robot itself is an operator that can move autonomously, Timely complete the tasks of multiple different stations in the production line. Using Mecanum wheel drive mode, Realize 360° movement in any direction, and can work flexibly in a small working space, effectively Improve site utilization and production efficiency. Through the matching of rich end fixtures and visual knowledge Different equipment, which can realize grasping, assembly, sorting, loading and unloading, moving, handling, vision Detection and other functions are more accurate, stable and efficient.

Paper Cup Packaging Machine introduction: * HMI friendly interface for easier operation; * High quality AC drive for main motor; * High precise sensor for parameter compensation; * Conveyor belt design for 24hours running; * Perfect seal for each of package.

TR10-700-400 is a 4-axis vertical multi-joint robot with an effective punching load of 10KG. It can adapt to a variety of different application scenarios, and can customize five or six axes according to customer needs. TR10-700-400 product is easy to understand and has a solid structure to meet the requirements of customers for product diversification, high efficiency, and product production.

LiDAR 3D SLAM AGV features: 3D sensing, all-round security protection; LIDAR 3D SLAM AGV can be applied to factory automation, warehousing automation, port automation and other applications, taking automation operations to a new level.

Wafer Polishing Machine High-precision double-sided grinding polishing machine TR-32B Mechanical Dimensions: Length 3850㎜×Width 2900㎜×Height 3700㎜ Machine weight: 26000KG

1. It adopts the newest type high-power transmission mechanism to arrange the chain and drive the main driving shaft. The errors and noises of other gear wheel transmission can be avoided. 2. Imported controlling system is adopted; also it can be equipped with detecting and rejection function device (Omron Sensor) for number of medicines according to the user’s requirement. It adopts imported frequency inverter. 3. It adopts photoelectrical controlling system to make PVC, PTP, Aluminum/Aluminum material to be automatically fed and waste side to be cut automatically to guarantee the Synchronous stability of over- length distance and multi stations. 4. It can be optional equipped with photocell correction device, imported stepper motor traction and image- character register to optimize packing grade 5. The machine is suitable for industries of foodstuff, medicine, medical instruments, hardware, electronics and etc. for packing.

Metal processing industry: blanking on punching machines, CNC loading and unloading, workpiece grinding, deburring; Electronic products industry: assembly, IC chip testing and handling, spot welding, PCBA soldering, glue application, screwing, plug-in, workpiece polishing; Automobile and motorcycle parts industry: handling, gluing, spot welding; LCD/LED and glass industry: handling of glass plates, assembly of LCM modules, handling of silicon wafers and display screens; Laser industry: spot welding, cutting; Home appliance industry: assembly, handling and screwing of home appliance products; Research areas: student teaching, school research and development.

ROKAE SR5: 5kg payload, 919mm reach, 6-axis compact collaborative robot. Ideal for light industrial assembly, machine tending, and automated testing applications. Partner: ROKAE | TROY Supply.

A smart and cool two-wheeled Robot, and also an open development platform.

The six-color bending offset printing machine adopts a reasonable structure and high-quality accessories to ensure the machine is durable, practical, high-quality printing, high production efficiency, and easy to operate. This machine is letterpress printing, mainly suitable for surface printing of cups and bowls

Single layer clothing fabric vibrating knife cutting machine featrues: *Intelligent edge-finding cutting; *Positioning and cutting accuracy ±0.01mm; *2000mm/s running speed; *No template is required for data import and cutting.

ADTECH 4 axis SCARA robot arm with high performance and excellent precision.

Smart Garden Robot Host: Leaf Blower Robot Lawn Mower Robot Snow Sweeper Robot Independently developed world's first consumer-grade smart garden snow sweeper robot

MIG welding robot for steel, stainless steel. Compatible with 1/2 axis Rotator table. Laser seems tracking system is available for this robot !

Double seats Helicopter features: 4-cylinder gasoline engine, 1800cc emissions, 120 horsepower, imported engine, lifetime warranty on the entire engine.

Injection molding machine equipment: Precise locking system, outstanding efficiency, efficient servo drive, all meet all requirements. Focus on customer products, provide a complete set of technical solutions for customers, and create better investment returns and customer experience for global customers.

Laser spot welding is the use of high-energy laser pulses to locally heat the material in a small area. The energy of the laser radiation diffuses into the interior of the material through heat conduction, and the material is melted to form a specific molten pool. Laser spot welders (jewelry spot welders) can weld the same or different materials together. TR-PMC series products are improved by introducing advanced German design technology. This series of products adopts ergonomic design and is produced with international first-class accessories. The whole machine is more reliable, more durable, more convenient and more efficient.

Cnc Milling 4 Axis Controller In China CNC9640 1.CNC9640 is 4 axis milling/drilling controller 2.CNC milling controller with 7 inch screen 3.can work together with addtional panel and handhold box

Inspection four-legged robot dog applications: Facing the application requirements in complex and dangerous environments, it provides intelligent solutions for application scenarios such as firefighting and rescue, anti-terrorism, and anti-explosion.

Power: 5W Range: Over 2000m Battery type: 18650*2 lithium battery Dimension: Length 21.5cm * Diameter 4cm.

The collaborative palletizer workstation is a small moving expert specially tailored for food, medicine, 3C, food, printing, daily chemical and other industries. It is designed with visual programming and only takes 5 minutes to enter information. Products/cartons are stacked on wooden boards to achieve unmanned handling. The user-friendly visual programming design makes it easy for operators to operate the robot; the high-load designed end effector can grab products weighing up to 20KG. The machine has flexible deployment, small footprint, simple wiring, easy maintenance, and high efficiency. It can palletize 8-10 boxes in 1 minute.

One-button measuring Mini AOI are widely used in industry: Including machinery, electronics, mold making, injection molding, metals, rubber, low-voltage electrical appliances, magnetic materials, precision stamping, connectors, terminals, mobile phones, home appliances, printed circuit boards, medical devices, and watches etc.
Abdominal Toning Belt features: * Smart phone controls * EMS IC chip * 8 difference mode * 50 levels * Auto stop by 25 minutes * One button operation

Easy to operate: Force-free teching effectively reduces debagging time and learning cost, friendly interface for much easier to use. Modularity: All-in-one module of reducer,motor,encoderand drive,which is convenient for quick disassembly. Quick deployment: 5kg in rated load with 18.5kg in weight.Light-weight installation and flexible deployment.

TR-SBA for single mold line TR-SBB for double mold line Main products: Nitrile/PVC/Latex. gloves for examination, surgery, disposable glove for household, and beading, straight (powder/ powder-free).

Power: 100w Pulsed Applicable Material: PVC, Stainless steel, Carbon steel, Aluminum, Stone, Metal. Marketing Type: Pulsed Fiber Laser Cleaner Warranty of core components: 2 years Core Components: MOPA Laser, Professtional Laser Clean Head Dimension(L*W*H): 336*129*400mm Weight (KG): 12.5 KG Laser Frequency: 1-3000kHz Laser output mode: pulse Fiber Cable Length: 5-10m pulse width: 2-500ns Scan width: 300mm adjustable function: laser removal oil / rust / coating Scan Mode: 7 patterns

Laser SLAM Smart AMR Robot forklift type: *2 Ton stacking payload; *Maximum Lifting Height reach to 3000mm; *Compact and Flexible.

Equipment Fetures: * High Speed process up to 600pcs/min. * Large payload of Delta Robot by 7kg. * Japanese Panasonic Servo Motors. * Smaller design than other famous brand.

Jaka Cobot Zu 12 Features: JAKA Zu 12 collaborative robot has a dead weight of 41kg, a load of 12kg, and a working radius of 1327mm; Integrated joint design, easy to assemble and disassemble; Higher load capacity and larger working radius replace heavy manual handling work, taking into account deployment flexibility and ease of use; There is no need to install safety fences, and it can collaborate seamlessly with people, robots and the surrounding environment; Recommended industries and applications: Automobiles and related, precision manufacturing, electrical appliances, food

High-altitude Glass Wall Cleaning Robot Features: Robot size: 1377*1000*288 mm Traveling mode: Suction cup adsorption and wheel-type movement, automatic/manual travel possible Obstacle surmounting ability: Concave-convex height does not exceed 10 mm Cleaning efficiency: 720㎡/h Battery life: 3 H/battery (±30%)

Manned Flying Saucer features: Maximum range: 6km. Number of passengers: 2 people (75kg/person). Advantages of flying saucers: Fully enclosed safety design, cool appearance, water take-off and landing capabilities.

The intelligent digital ultrasonic welding system is mainly used in the fields of face mask machine, medical protective clothing making, diapers, non-woven bags making machine, non-woven clothing stitching, trademark slitting and nylon band cutting, etc.

Inspection water proof robot dog TR4D-20 applications: Leading digital industrial solutions, define a new boundary for quadruped robot applications. *Security Inspection *Survey Exploration *Emergency Rescue

Bionic Humanoid AI Robot TR-S02 Specifications: Height: 169cm Weight: 69kg Maximum walking speed: >1.2m/s Battery: 700w.h Full body freedom: 40+ active freedom Bionic head: 26+ freedom Expression: 80%+ expression Turn around: 60cm width Working temperature range: 10~40C Battery life: >2h

Automatic Balloon Packing Machine applications: Suitable to use in packing the pellets, bar, brain shape material. Such as puffed food, candy, small biscuit, vegetable slice, nut, fried material, pet food, small hardware etc.

3D Handheld Scanner Applications: Ø Automobile manufacturing Ø Aerospace Ø Power generation Ø Model manufacturing Ø Casting inspection Ø Construction machinery Ø Design inspection Ø Architecture sculpture

This machine can be applied to glass, light guideboard, touch panel and other industries of the coating process. All requirements for precise position requirements can be used.
TR5-850 is a 4-axis vertical multi-joint robot with an effective punching load of 5KG. It can adapt to a variety of different application scenarios, and can customize five or six axes according to customer needs. The TR5-850 product is easy to understand and has a solid structure to meet the requirements of customers for product diversification, high efficiency, and product production.

1500cc 4 wheel drives 107 horse power 4 cylinders by fuel injection

Pipeline Inspection Robot Functional features: The TR-S2 pipe network inspection robot adopts an exclusive patented design of dual-power spiral propulsion, which is suitable for imaging inspection of pipes and box culverts with a diameter of DN600 or above. In water working environments, it can be equipped with underwater sonar probes. The intelligent control terminal software integrates multiple inspection function modules, which can realize data superposition function and quickly generate inspection reports.

1. Aluminium alloy structure is adopted, which is beautiful and firm without rust. 2. Computer PLC programming control, high stability, low failure rate and low noise. 3. Adopt imported servo motor, stepper motor drive, high precision. 4. Photoelectric detection of raw materials to avoid mistakes and reduce waste. 5. The machine adopts heavy-duty casters and cushion foot cups to move and fix, which is convenient and fast to move without shaking or hurting the floor. 6. The model is equipped with a new advanced conveyor belt, which automatically collects products with high accuracy, and only needs to be sorted and packed.

1, Conditions of use:380V/3phase/50HZ; 2, Materials used:PP meltblown special material;melt fat 1500 3, Product specifications:L=420mm, δ=0.008~0.1mm 4, Extrusion output:25~50Kg/H varies according to material,thickness and process.

The structure and characteristics of the fan: This series of blowers are of single-stage, single-suction, cantilever-supported structure, driven by a coupling, the air inlet is horizontal and axial, and the direction of the air outlet is 0° or 180°. Viewed from the motor side, the blower rotates counterclockwise.

Four-axis CNC linkage control, large cone angle device. Iron resin casting machine body, metal baffle, user-friendly design, central lubrication system, automatic line tension device, digital scale and reading, highly integrated controller for easy maintenance and troubleshooting, Windows basic interface, AutoCAD programming, and simple operation.

Plasma/Flame cutting machine controller Famous Brand in China CNC industrial field Easy operation and multiple functions Online technical supports

Yaskawa Scara Robot SOC series: The MOTOMAN-SOC series is a SCARA robot specially built for high-speed operations. It is suitable for various scenarios such as assembly, transportation, packing, sorting, and inspection of small parts.

TR5-7CO is a 6-axis vertical multi-joint Cobot with an effective load of 5KG. It can adapt to a variety of different application scenarios, and can customize five or six axes according to customer needs. TR5-7CO Cobot is easy to understand and has a solid structure to meet the requirements of customers for product diversification, high efficiency, and product production.

Quiet Industrial DC Fan features: *Copper wire motor *Super quiet bearing * Low power consumption and environmental protection * Flame retardant material

TROY AMR Robot opens the SDK to all users, provides rich API interfaces, has strong extensibility, and has certain development capabilities As far as customers are concerned, customized development can be realized according to the application needs of the scene, which meets the diversified needs of the market for mobile robot chassis.

Electric push forklift features: Brand: OEM Steel plate thickness: fork 8mm Weight: 50kg Maximum lifting speed: 8cm/s Number of casters: 4 pc Caster Material: Nylon Plate thickness: 4cm Special industry: logistics industry / loading and unloading team / factory Load capacity: 500kg Fork Length: 90cm Model: TR-C01

Plasma/Flame cutting machine controller Famous Brand in China CNC industrial field Easy operation and multiple functions Online technical supports
TRE06P 6 axis educational robot can be used for high school, robot engineer training school purpose.

Passes signals with frequencies below the selected Cutoff Frequency and attenuates signals with frequencies above the Cutoff Frequency.

Overall length: 108cm; Blade length: 73cm; Handle length: 29cm; Blade width: 3.8cm; Thickness: 0.5cm; Weight approx.: 1300g; Blade material: High-performance manganese steel; Sheath material: Solid wood wrapping; Weight without sheath: 1000g; Handle material: Solid wood; Cord fittings: PC-ABS.

Robot Features: Configure 300ML special silicone barrel Precise glue dispenser, accurate glue application, quick glue reaction Suitable for silicone, yellow glue, white latex, glass glue, sealant, etc. Chemical resistance, strong durability, balanced coating lines At the end of each dispensing cycle, there is a suction force to solve the serious problem of glue drawing.

Water drone with camera: *4 working hours *Water depth 30 meters *Fish finder device *VR glasses supports

The cantilever positioner workstation is an automated solution designed for handling large, heavy, or irregular workpieces. It assists welding robots in achieving omnidirectional operations by moving, flipping, and rotating the workpiece in three-dimensional space, thus playing a crucial role in fields such as engineering machinery, shipbuilding, and wind power. Its core equipment is the cantilever positioner integrated into the workstation.

TROY Welding Robot with good price, popular MIG welding Robot job(15 month warranty)

E-Cigarette features: *Standard test environment: Temperature: -5—42℃ *How to use: Pull the silicone of the atomizer mouthpiece outwards to expose the smoke outlet. Then remove the bottom sticker and start using it. (If the amount of smoke extracted is small, please replenish the battery in time)

ADTECH CNC9620/4620 2 axis Turning/Lathe Machine CNC control System for CNC lathe and turning system

The Electronic Microscope of TVN-600 for Inspection & Measuring: *Graphic overlay *Microscope *HDMI camera *Video microscope

【Model】TR1006A-15MZ 【Action type】Multi-joint type 【Rated load】6kg 【Motion radius】1500mm 【Weight】150kg 【Number of axes】6 axes

AI Reception Robot features: use: Restaurant & Hotel Supplies Place of Origin: China Model Number: TR-WS02 Color: Starry White/Starry Night Black Material: High Strength PC+ABS Size: 410mm*410mm*1000mm Applicable people: ALL Battery capacity: 10.4 Ah , 25.2 V Endurance time: 8h Net weight: 21.1kg Screen size: 14 inch
MIG welding robot for steel, stainless steel. Compatible with 1/2 axis Rotator table. Laser seems tracking system is available for this robot !

Adult Diaper machine: Customized specification; 3-shaft drive/Full servo, timing belt and flat belt are imported products, and all the key parts use imported bearings. Germany BST automatic web guide system (optional).

What does Robot Puppy do for you? Video surveillance, Visual line patrol, Ultrasonic obstacle avoidance, Self-balance control, Motion detection, Color recognition.

The handling robot is mainly suitable for large load and large-scale work occasions. Industrial Robot For Material Handling have Good general performance and Fast running speed.

AA Battery Standard Size: Diameter(D) mm 14±0.5 Height(H) mm 50±0.5 Weight(W) g 14.1±0.5 AAA Battery Standard Size: Diameter(D) mm 10.1±0.2 Height(H) mm 44.5±0.5 Weight(W) g 7.1±0.2
TH08R Spring Control System is a multi-functional, economical embedded numerical control system developed by Adtech, it's for 2-4 axis universal machine, spring compression machine, and spring torsion machine.

Desktop Metallographic Measuring Microscope TVN-50MINI: This product combines the high magnification of a metallographic microscope with the X, Y, and Z dimensional measurement capabilities of an image measuring instrument, making it a multifunctional measuring instrument with high-precision linear measurement and observation capabilities.

The high configuration of our Delta Robot ensures with high performance and high cost performance: *By using imported from Japan's Panasonic servo motors. *by High precision planetary reducers. *Payload from 1kg to 15kg. *Working Diameter from 350mm-1400mm.

*Compact structure, easy for installation and maintenance *Full Servo System, speed is adjustable *PLC control, highly automatic *HMI is easy to operate *Multiple positions are equipped with detecting sensors, which are reliable to detect exceptions to reduce wastes. *Key parts and components use world famous brands for ensuring the stable performance of machine *Stable running and high efficiency

Similar your real girlfriend Customized body shape, face appearance and eye color options etc. Warm Body function Fluently English and Chinese speaking

Electron Microscope TR-MS8001 is widely to be used: Such as microscope for PCB board inspection and QC department. Also University Class etc.

The 4 axis industrial robot is designed for palletizing and heavy parts movement

Motorbike Dimensions: 2050*620*1160(mm) Gross Weight:200kg Designed Speed: Up to120km/h Motor input power: 72V 5000W

Similar your real girlfriend Customized body shape, face appearance and eye color options etc. Warm Body function Fluently English and Chinese speaking

*Equipped with visual positioning, depth vision camera, lidar *Precise positioning and navigation of walking routes, autonomous planning *Multi-machine collaboration and orderly distribution

We offer video microscope solutions that make industrial inspection easier, more convenient and more efficient. At the same time, ergonomic issues such as operator comfort and wafer safety are particularly important when integrating microscope successfully into production lines, and we focus on addressing such issues. The company has been providing new ideas, solutions and technical support to a wide range of industries, including semiconductor wafers, flat panel displays and electronic devices.

The double reheat ultra-supercritical 660MW steam turbine covers a power range of 600MW to 700MW, with steam inlet parameters ranging from 31MPa/600℃/610℃/610℃ to 35MPa/610℃/630℃/630℃.

Six degrees of freedom, weight 33.5kg, load 12kg Working radius 1304mm Repeat positioning accuracy ±0.03mm Maximum speed 3.2 m/s Typical power 500W Protection grade IP54

Fully self-cleaning AI technology: Glass vSLAM® technology based on semantic vision can realize millimeter-level positioning and navigation on the surface of components only by the robot's own AI vision system, without modification, pre-mapping, and personnel monitoring, autonomous perception, planning, and decision-making, and perfect cleaning automation. At the same time, it guarantees extremely high security and robustness.
Autofocus Digital Microscope features: *Built-in precision optical focusing system -all in one *Software fast algorithm *Auto-focus in real-time, within the adjustable range, no need to adjust *Auto-focus precise picture rendering

1. RTX3060 6G GDDR6 ultra high performance graphics card 2. The latest tenth generation Core 6-core i5-10400 high-performance CPU 3. Colorful backlit keyboard, 1920*1080 Full HD 144Hz 45% IPS screen 4, 8GB DDR4, 512G SSD mass storage

Electronic Microscope features: Model: TVN-S6000NMX Type: Electron microscope Resolution: 1920 X 1080 Frame rate: 60fps. Optical size: 1/1.2" Network interface: 100MB/s.

High Quality AC Servos for Robot build up or retrofiting CNC machines etc. OEM available to our customers, ac servo driver, ac servo controller

The laser SLAM latent jack-up handling robot is an upgraded model of the original 300J, which uses a new PI industrial design. First, the car body size is optimized, which is close to the original 150J size, but the load remains unchanged at 300KG; in addition, the optional downward-looking QR code camera and 5G module are added, and the standard laser can support small-scale reflector navigation; At the same time, the original product can identify various shelves and drill into the jacking shelf function, and the height of the chassis after the integrated jacking mechanism is lower.

TR-IX2 Pro Wireless Infrared Thermal Imager for Mobile Phones: TR-IX2 Pro is a new type of wireless infrared thermal imager for mobile phones, compatible with both Android and iOS devices, achieving wireless image transmission up to 30m. It features a 256×192 thermal imaging resolution, which can be increased to 512×384 through 4x AI real-time super-resolution. A 7mm adjustable focus lens ensures clear images at both near and far distances. AI Xiao Rui voice interaction allows for quick parameter settings. Suitable for scenarios such as circuit board inspection, electrical maintenance, equipment inspection, and HVAC leak detection.

Jacking AMR MINI Forklift Features: *European standard pallet Adaptable to EPAL European standard pallet *Dock-type docking Active telescopic fork arm *High safety 360° laser obstacle avoidance, fork tip protection, etc. *Narrow lane passage APR rotation in place

*Product advantages: fast speed, high precision *Long service life and stable performance *Strong compatibility and strong flexibility *Simple control and ease of use

ROKAE CR12-20 — 20kg, 6-Axis, 1434mm Payload 20kg Reach 1434mm DOF 6-Axis IP IP67 Brand: ROKAE | Partner: TROY Supply

The research and development, production, sales and service of intelligent equipment for household paper provide customers with fully automatic intelligent equipment and comprehensive solutions for the manufacturing, processing and packaging of household paper.

AI ontology in the intelligent era GR-1: Embodied intelligence combines artificial intelligence technology with robotic entities, giving the "brain" a controllable, perceptible, interactive, and actionable "body." GR-1 adopts a highly scalable design, which can achieve more AI model and algorithm verification, and has great potential in multiple application scenarios such as industry, rehabilitation, home, and scientific research.

【Model】TR1006A-20MZ 【Action type】Multi-joint type 【Rated load】6kg 【Motion radius】2000mm 【Weight】170kg 【Number of axes】6 axes

Electron Metallographic Digital Microscope TVN-MT60_B of main features: The atmosphere is stable and the operation is more flexible. It integrates various observation functions such as bright field, dark field, polarized light, and DIC differential interference, which can be selected according to actual applications.

Fiber Laser Obstacle Remover TR series: Action distance: 10-650 meters Action objects: kites, kite lines, advertising cloths, sunshade nets, building dust nets, transparent films, agricultural plastic films and other non-metallic foreign objects, bird nests, hornet nests, large tree obstacles and obstacles that are difficult to clear. Total machine weight: host 27kg (including transmitter), battery 21kg

Balance Crane features: 1. The operating range is 7 meters, and the market is generally 5 meters. 2. The lifting mechanism adopts the elevator principle, and the failure rate is low. 3. 360 degree free rotation, no dead angle. 4. 1.5KW motor, low energy consumption and low noise. 5. The appearance is electrostatically sprayed, which is beautiful and has good anti-corrosion performance. 6. It can be customized according to customer needs.

Composite Cobot Solution: TR composite robots are applied across numerous industries, providing innovative, efficient, and competitive overall intelligent manufacturing solutions that enable enterprises to achieve higher production efficiency, reduce costs, and bring about innovation to target industries.

AI Coffee Robot Specifications: Robot weight: 72KG Base size: 650mm in diameter Movement range: 750mm Clamping type: mechanical parallel clamping Maximum movement speed of the end of the robotic arm: 1m/s Repeat positioning accuracy: ± 0.1mm Degrees of freedom: 12+2 Clamping payload: below 3KG Input voltage: AC 100-240V Interface: RJ45x2, HDMIx1, USBx4 Programming method: PC/mobile graphical interface/Python/C++/ROS low-level interface

Scope of application for checking weight machine: Automatic Weight Machine is suitable for testing whether the weight of a single product is qualified, and is widely used in electronics, pharmaceuticals, food, beverages, health care products, daily chemicals, light industry, agricultural and sideline products and other industries. Such as conditioning products, pastries, ham sausages, instant noodles, frozen foods, food additives, pigments, modifiers, preservatives, etc. in the food industry.

3d Digital Microscope Features: *Three-dimensional viewing plane 3D mode can be switched *Light source continuous reading adjustable 0.7-4.5X optical magnification adjustable *Image storage Frame freeze, image comparison *Strong light suppression, edge enhancement *Color Independent Adjustment *White balance adjustment Automatically adjust exposure *High speed 60 frames per second Mouse operation, U disk read and write

Potato Chip/French Fry Production Line Process: It utilizes dual mesh belts for food conveying, with variable speed adjustment for the upper and lower belts. An automatic lifting system facilitates cleaning within the machine, ensuring continuous production at a constant temperature, and an automatic fume exhaust system. The oil-water mixing process allows food residue to automatically sink into the water, keeping the oil surface clean. The heating system uses electrically heated thermal oil to indirectly heat the cooking oil, accelerating the oil's temperature rise and reducing carbonization during frying, ensuring oil quality and extending its lifespan.

The best carrier of embodied intelligence and a new intelligent partner for mankind. Including arm freedom; leg freedom. 18 degrees of freedom for the whole body. Purely Electric Drive.

MIG and TIG welding robot for steel, stainless steel and alumium etc. OEM Robot customers are more than welcome !

TaiWan famous brand servos drives A2 and B2 series

Semi auto labeling machine applications: It can be used for labeling various specifications of cylindrical objects, such as red wine bottles, beverage bottles, xylitol, cosmetic round bottles, medical test tube oral liquids, etc., equipped with full-week/half-week labeling, and labeling functions on the front and back of the circumference; can be equipped Ribbon printers, inkjet printers, and labeling machines print production batch numbers and other information at the same time.

laser cleaning machine TR-CL2000 features: 1. High-power fiber laser laser cleaning machine 2. Non-contact cleaning, no damage to the parts matrix 3. Precise cleaning, can achieve precise location, precise size, selective cleaning 4. The operation is simple, just power on, and it can be hand-held or cooperated with the manipulator to realize automatic cleaning. 5. The cleaning effect is very high and saves time. 6. The laser cleaning system is stable and requires almost no maintenance.
Dumpling Machine Specifications Dimension: 3400*2850*2000 Model: ZK-3-SJ Generation rate: 14000/hour Output: 280kg/hour Power: 12.9KW Power: 380V 50Hz(3P)

ADT-8940A1 is high cost effective pci-bus motion control cards. It support linear, arc. interpolation.40 channel input and 16 channel digtial output port. It can be application for cutting machine, engraving machine,laser equipments.

Three-wheeled electric forklift Introduction: 3 wheeled forklift is designed to lift standard pallet with 500kg load capacity and 2150mm lifting height. Mini Electric Forklift is an ideal facility to load/unload goods in stacking warehouses, super-market, workshops, production lines or handle goods on/off trucks, containers, etc

6 Axis Industrial Robots for CNC machines feeding purpose, 15 month warranty would be given !

Slurry Balance TBM: Mud is used as the main medium to balance the ground pressure on the tunnel excavation surface, and slag is discharged through the mud conveying system. The excavation diameter covers 2.7 meters to 17 meters.

3D Printer Model: TR-6610D Applicable raw materials: pla Printing accuracy 0.1mm Molding method FDM Layer thickness 0.05-0.6mm Positioning accuracy 0.001mm Heating plate temperature 110°C Nozzle temperature 0-260°C Movement speed 30-150mm/s Actual power 350W+ Input voltage 220V (V) After-sales service 1 year warranty

- Cooling type: Water cooling structure - Sample Desk: Diameter of substrateΦ80 mm - Temperature measurement on substrate:Infrared Temperature Range300—1400℃+Intelligent AI temperature measurement (double temperature measurement) - Height adjustment: Growth height of sample table can be adjusted by ±15mm - Expansibility: Growth Platform can be extensible

Main functions: Press EVA, solar cells, tempered glass, and backing film (materials such as TPT) into a rigid unit under high-temperature vacuum conditions.

80HP diesel | L4 Autonomous Driving | RTK 2.5cm precision | 32-line LiDAR | 4WD 12F/12R | Cat-2 3-point hitch | Dual PTO 540/760 rpm | 4040x1850x2740mm | 3200kg | DG/T 001-2019 certified
CNC 4 Roll Plate Rolling Machine applications: This machine is suitable for the bending and forming of metal plates. It can roll round, arc and conical workpieces within a certain range. It has the function of pre-bending the end of the plate, the remaining straight edge is small, and the work efficiency is high. It can be used on this machine. Rough leveling of sheet metal. It is widely used in petroleum, chemical industry, boiler, shipbuilding, metal structure and machinery manufacturing industries.

ROKAE CR18C xMate — 18kg, 6-Axis, 1062mm Payload 18kg Reach 1062mm DOF 6-Axis IP IP67 Brand: ROKAE | Partner: TROY Supply

Multi-layer pallet free combination The number of pallets can be switched freely, open pallets Design, single layer load 10Kg, total load can be Up to 40Kg, free to charge and easy to use Noisy environment responds like a stream Equipped with high-definition camera, 6Mic array and operation screen, Support visual, voice, touch screen multiple interactive methods Recognize the way independently, fast and stable Built-in sensors, autonomously plan the optimal route Equipped with lidar obstacle avoidance sensing system More stable delivery

Tiny Humanoid Robot TR-T1 Features: *Height: 1200mm; *Weight: 30kg; *Battery life: 2-4 hours; *Support Second R&D Project; *Anti-fall and Automatic Stand-up function.

1) 4-axis CNC milling Center 2) 7.0 inch color LCD display screen 3) New design model 4) ATC and macro function

Chengying——Ultraviolet disinfection robot Sterilization is efficient, safe, and pollution-free Signify UV-C UV light source, new coronavirus (COVID-2019) The inactivation rate is as high as 99.9999% According to the research of the authoritative research institute (NEIDL) in the United States, the virus has been exposed to UV-C for a few seconds. Cannot be detected

Robot Applications: ——Material handling, palletizing, die casting, assembly Greater flexibility, more stable performance, and lower energy consumption; Minimize errors through the robot's visual function; (whether to use it) Maximum throughput with high-speed performance; Long working time; Fixed automation;

Fruit Peeling Machine Information: Product Model: TRP-99S Product size: 600*600*1410MM Product output: 180-300 pieces/H Product power: 800W/1600W Product weight: 100KG Product material: 304 stainless steel

The TVN-2K30/4K30 high-definition industrial camera is easy to use, featuring a built-in personalized interface editing function, template application, mouse operation, USB flash drive storage, and includes functions such as automatic edge finding, automatic contouring, horizontal and vertical flipping, line/circle calibration, data export, and playback browsing. It also provides various measurement tools such as "parallel lines," "point-to-line," "concentric circles," angles, and radians.

The RPNS control system (ROBOT POSITIONING NAVIGATION SYSTEM) has functions such as measurement, perception, navigation, positioning, and control. It adopts an open technical architecture and can be adapted to mainstream robot ECU\VCU, supporting manufacturers to complete secondary development on their own. The system supports seamless access to various downstream terminals and can be widely used in logistics, inspection, security, surveying and mapping, supermarkets, new retail and other fields.

The security patrol robot has four core technologies with independent intellectual property rights, creating a smart new security model of human-machine collaboration, and helping the police to develop through science and technology. At present, patrol robots have very mature applications in airports, stations, supermarkets, pedestrian streets and other scenarios.

Robot Features: Large working space High repeat positioning accuracy Stable performance Cycle speed faster Good general performance Modular mechanical structure design

Carbon Crystal painting heater features: Rated Voltage: AC220V+/-5%, 50HZ Power: 500w Frame: Alu frame Certification: CE, RoHS Working life: >100,000 hours Overheat protection: Yes Electric conversion rate: 98% Heating element: carbon crystal Infrared heater type: electric Leaking current: below 0.01ma Screen temperature: 70-85°C Heating area per pc: >20m2 Color: painting/picture/pure white Installation: Wall Mounted, Freestanding Function: Intelligent Adjustable Thermosta OverheatProtection

AUBO-i16 collaborative robot has a payload of 16kg. Max. length 1130.5mm, Max. Reach 967.5mm. Large payload, small size.
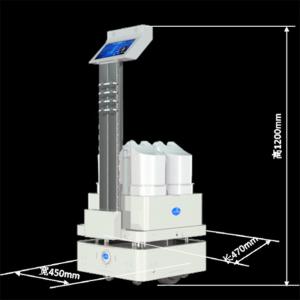
It mainly includes two parts: intelligent mobile platform and automatic killing system. The automatic killing system is under the core control system of the robot. You can use voice to control the killing power, killing range, killing path, killing time, etc.

Equipped with an L4 water surface automatic driving system, manual/automatic driving can be switched independently, bringing a new tour experience. It is suitable for water surface sightseeing, transportation connection, research experience, water afternoon tea and other scenarios, and promotes the rapid realization of water tourism and water transportation. Digitization and intelligence.

E-Cigarette features: *Standard test environment: Temperature: -5—42℃ *How to use: Pull the silicone of the atomizer mouthpiece outwards to expose the smoke outlet. Then remove the bottom sticker and start using it. (If the amount of smoke extracted is small, please replenish the battery in time)

Similar your real girlfriend Customized body shape, face appearance and eye color options etc. Warm Body function Fluently English and Chinese speaking

GH-CNC820 is 4~6 axes economic type CNC spring making controller, it is specialized to compression spring machine, torsion spring machine. It has 5.7 inch LCD display screen and English application software.

MG500 Rally Motorcycles are designed for off road users, it's can be rided on both high road and off road

Delta 3D printers are designed for PE/PVC material parts printing, suitable for toy factory makers

CNC9620 CNC Lathe machine control system Introduction: ADTECH specifically for small and medium sized machine tool manufacturers both in domestic and abroad independent research and development of cost-effective CNC control system. Use ARM high performance CPU and super-large-scale programmable device FPGA, real-time multitasking control and hardware interpolation technology to ensure high efficiency of the system under the um-level precision machining. 256M electronic panel meets variety of large program work pieces. 7 inches color screen, interface can be made of parameter selection in both Chinese and English.

Product specification: Length 15m, Height 1.8m, Width 3.2m; Speed: 900 boxes/Hour.

The operation of the machine is realized through the flashlight door button. The flashlight door has 2-6 buttons, usually the 6-point switch controls the fast up, fast down, slow up, slow down, left and right rotation and the horizontal forward and backward walking of the hoist trolley. Usually within 500kg, it can be equipped with Angmar manual trolley, and the button switch can only be operated up and down. If it is above 1t, it can be equipped with Angmar electric trolley, which can have up and down, left and right, front and rear operation switches.

Robot Applications: ——Material handling, palletizing, die casting, assembly Greater flexibility, more stable performance, and lower energy consumption; Minimize errors through the robot's visual function; (whether to use it) Maximum throughput with high-speed performance; Long working time; Fixed automation;

Mini Drone 2021 Features: *4K dual cameras *15 minutes flying time *Maximum flying altitude 120 meters *Unit weight 0.29 kg *360 degree stunt show

ADTECH 6 axis milling machine controller Famous Brand in China CNC industrial field Easy operation and multiple functions Online technical supports
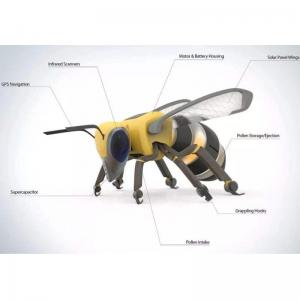
The MINEBEE super mini drones are coming soon !!!

2 Axis Punching CNC Controller support multi-language option,with CAM template guide edit function, easy to use. Support CAM file resolving process.

Trailer Moving Robot adopts multi-sensor fusion SLAM technology, including laser, vision, and satellite navigation sensors. It also adopts a multifunctional chassis that can be towed or pulled. Trailer Moving Robot can be used in various fields such as factories, automobile manufacturing, ports, and food,achieving all-weather and full-function unmanned transport.

The DELTA robot is a classic parallel robot configuration. It has the characteristics of three-dimensional XYZ translation and rotation around the Z axis. It has the advantages of fast speed, good accuracy, high reliability, strong ease of use, and low maintenance cost. It is widely used in high-speed sorting and packaging fields.

Product Features: Accuracy: 0.1mm Speed: 40-80 bottles/min Bottle diameter: 40-100mm Bottle height: 50-300mm

Robot Applications: ——Material handling and palletizing Greater flexibility, more stable performance, and lower energy consumption; Maximum throughput with high-speed performance; Long working time; Fixed automation.

SRC-based laser SLAM stacker automatic forklift TR-FL300P, equipped with SRC series core controller, can identify pallets, fork goods accurately, and operate efficiently; and adopts laser SLAM navigation, no reflector, easy to deploy; fuselage 360 °Comprehensive protection + 3D obstacle avoidance to improve the safety of robot operations; the lifting height can be customized, which is a "stacking weapon" in the factory; the maximum load is up to 3000kg, suitable for large factories or warehouses. Load handling, stacking and palletizing scenarios

Tea Packaging Machine Features: Sealing material: PVC Applicable objects: All kinds of tea Total product weight: 180kg Fully automatic Product size: 75*70*150cm Rated power: 0.8kw

TR-SBA&TR-SBB Surgical Examinational Disposable Glove Dipping Machine and Glove Packaging Machine TR-SBA for single mold line TR-SBB for double mold line Suitable materials: PVC emulsion\Latex\Vlnyl Main products: PVC/Latex/Vinyl gloves for examination, surgery, disposable glove for household, and beading, straight (powder/ powder-free).

Lower Exoskeleton Robot Main functions: *Servo power unit *Three force impedance control technology *Force control integrated drive unit *Integrated TBG (Twist Belt Gear) *Deceleration system

ADTECH additional panel suitable for 6 axis CNC controller such as CNC4960, CNC9960 etc.

High-performance AGI Humanoid Robot TR-Star 1: *Degrees of freedom: 55 *Maximum joint speed: 25 rad/s *Height/weight: 171 cm/63 Kg *Total machine load: 160 Kg+ *Maximum joint torque: 400 Nm *5 Fingers Hand: fully self-propelled joints / 12 independent degrees of freedom.

Autonomous navigation, flexible obstacle avoidance, routes, trajectories can be set arbitrarily. Cyclic Sweeping & scrubbing in heavy polluted areas until all areas has been cleaned.

4 axis delta robots are designed for food packaging in the production lines. such as chocolate, biscuit and bread factory makers.

High quality 6 axis Robot 50kg payload; Easy operation for ending users !

ROKAE CR20-17C-5 — 17kg, 5-Axis, 2047mm Payload 17kg Reach 2047mm DOF 5-Axis Brand: ROKAE | Partner: TROY Supply

Smart Parking Robot DESCRIPTION: The clamping car transporter is a car transport device that clamps the car tires in and out. Compared with traditional car transporters, it is ultra-light, ultra-thin, and has strong adaptability to the ground and tracks. It also has the characteristics of fast transport speed and short clamping time. It can be effectively used in many types of mechanical parking garages, such as plane movement, aisle stacking, tower warehouses, and car transport.

Robot Features: Large working space Stable performance Run fast Good general performance Modular mechanical structure design

The high configuration of our Delta Robot ensures with high performance and high cost performance: *By using imported from Japan's Panasonic servo motors. *by High precision planetary reducers. *Payload from 1kg to 15kg. *Working Diameter from 350mm-1400mm.

Vacuum Degassing Mixer Description: While rotating and revolving, the machine, coupled with a high-powered vacuum pump, mixes materials evenly within seconds to minutes. Mixing and vacuuming are accomplished simultaneously. Equipped with various clamps and cups, it can mix materials ranging from a dozen grams to 1500 grams.

Mobile Robot Platform parameters: Curb weight: 70KG Rated load: 85KG Geometric size: 974.16*782.02*364 (mm) The fastest speed: 2m/s Obstacle surmounting ability: 160mm Motor parameters: 4*400W brushless servo motor Communication interface: CAN/232 serial port Climbing angle: <30° Turning radius: 360° in place Battery: 48V30AH lithium battery

Production Speed: 40pcs/minute Machine operator: 1 person Suitable for N95/KN95 face mask suppliers in local country !

Similar your real girlfriend Customized body shape, face appearance and eye color options etc. Warm Body function Fluently English and Chinese speaking

Spherical Robot Dynamic inspection: The spherical robot moves smoothly and flexibly, is easy to control, and can be used on a variety of road surfaces; the closed spherical shell has strong self-protection capabilities and is anti-overturning. The robot uses advanced control algorithms to enable it to move flexibly in a variety of scenarios.

* 5 axis laser cutting machine * 1.8G acceleration * Compatible pipe diameter from 6-115mm * Round Pipe, Square Pipe, Rectangular Pipe, Oval Pipe etc. * Laser power from 1kw - 3kw.

2021 Version of TR-FL080, the SRC-based laser SLAM ground-mounted smart forklift, has made a number of improvements on the basis of the second generation, with a small size and strong load capacity; it is equipped with the SRC series core controller, which achieves high-precision positioning of ±10mm ;And cooperate with infrared sensors, 3D obstacle avoidance, safety edge and other sensors for safety protection, which can ensure the safety of personnel and goods during the operation of the intelligent forklift, and can flexibly complete the transportation of goods in narrow spaces, which is the realization of intelligent factory logistics. The "carrying artifact".
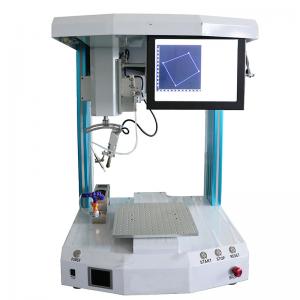
Soldering robots are designed for the factory with electric components assembling such as Samsung, Foxconn, LG and Canon etc.

TR series servo energy-saving injection molding machines: Precise clamping system, outstanding efficiency, efficient servo drive, all meet all requirements. Focus on customer products, provide al complete set of technical solutions for customers, and create better investiment returns and customer experience for global customers.

ROKAE SR3: 3kg payload, 705mm reach, 6-axis compact collaborative robot. Designed for benchtop precision assembly, lab automation, and light pick-and-place tasks. Partner: ROKAE | TROY Supply.

Palletizing Robot solutions for Heavy box: *200kg payload *3000mm working radius *0.03mm Repeat Accuracy *Yaskawa Servo system *LNC Robot control system

3D Digital Microscope TVN-800+P3D hardwares: The entire body (including the lens, LED light, and processing unit); 13 inch Screen; Accessories (DC power calbe for Microscope/screen, mouse, HDMI cable)

Robot Mechanical Parameters: Overall dimension: 1150(L) x 730(W) x 1138(H) Net weight: 280kg Electrical parameters: Battery voltage: 48V; Battery capacity: 130Ah Working hours for a single endurance: 6-8h Battery type: Lithium battery Performance Parameter: Working speed: Max: 1.3m/s, suggestion: 0.6m/s Cleaning efficiency: 2300㎡/h (typ1288) Cleaning width: 552mm Brush type: Double rolling brush Tank volume: 120L (internal circulation) Working noise: <76dBA

Delivery Robot Features: Body length/width/height: 3650*1560*1950mm Vehicle equipment quality: 770kg Maximum load: 1000kg Gradeability (no load): 20% Maximum speed: 30km/h recharge mileage: 100km Minimum operating temperature: -10℃ Maximum operating temperature: 50℃

R1 Robot Features: -Used for water search and rescue, fire rescue, towing and rescue transportation. -Support remote control/local dual control mode -Support one-key return to home, out of control return to home, reverse gear -Support infrared intelligent human detection -Suitable for scenes such as the sea, reservoirs, rivers, lakes, etc.

Similar your real girlfriend Customized body shape, face appearance and eye color options etc. Warm Body function Fluently English and Chinese speaking

TR-SBA&TR-SBB Automatic glove dipping lines: Surgical Examinational Disposable Glove Dipping Machine and Glove Packaging Machine TR-SBA for single mold line TR-SBB for double mold line Suitable materials: PVC emulsion\Latex\Vlnyl Main products: PVC/Latex/Vinyl gloves for examination, surgery, disposable glove for household, and beading, straight (powder/ powder-free).

Protection glove dipping Machine according to various materials (natural rubber, butyronitrile, PVC) PU curing process of humanized design, reasonable process, automatic balance fill glue system, make products to be stable, uniform coating thickness, length, No hanging point, temperature uniformity, high output, easy to stripping glove, etc.

Commercial Cleaning Robot: It adopts full 3D navigation and "modular" programmable design to specifically solve the cleaning operation problems in commercial scenarios. Can be widely used in hospitals, shopping malls, campuses, exhibition halls, office buildings, terminal buildings and other places.

Model number TVN-8008_A Series Multi-function Resolution 1920*1080 Video Port HDMI Color Colour Sensor Size 1/3" USB Port 2 Port Storage mode U-disk Storage Lens interface C-Mount Power DC 12V

1. PLC programmable control system, adjustable speed, visualization of efficiency, accurate display of faults, timely elimination. Adopting brands such as Siemens, Omron and Mitsubishi. 2. The mechanism is upgraded, from the traditional forward push type to the rear pull type mechanism, the space is small, the speed is faster, and the operation is more stable 3. The design is upgraded, the structure is integrated, the compatibility is stronger, the adjustment is convenient, and only 3-5 parts can be replaced





















Please read on, stay posted, subscribe, and we welcome you to tell us what you think.
 IPv6 network supported 粤ICP备2021036697号
IPv6 network supported 粤ICP备2021036697号 Online service
Online service 4000988557
4000988557 sales1@troysupply.comsales2@troysupply.com
sales1@troysupply.comsales2@troysupply.com Richard Liu
Richard Liu TROY
TROY 8936906
8936906 Troysupply_com
Troysupply_com