 English
English français
français Deutsch
Deutsch русский
русский español
español português
português العربية
العربية 日本語
日本語 한국의
한국의 Tiếng việt
Tiếng việt


Call Us Now
TEL: +86-4000988557;
Teams: gfreex@hotmail.com;
WeChat: Troysupply_com;
QQ ID: 8936906.

Considering that the current density of industrial robots in the global manufacturing industry is 55, while the density of China's industrial robots is only 21, which is much lower than that of developed countries such as Japan, South Korea, Germany and the United States, and in the context of intelligent manufacturing, the policy of "machine substitution" continues to be implemented. There is still a lot of room for growth. Related concept companies such as Inovance Technology, Robotics, Zhiyun Co., Ltd., Keyuan Co., Ltd., and Qinchuan Machine Tool will achieve better development under the robot dividend.
The development stage of industrial robots
The development of industrial robots can usually be divided into three generations:
1. First generation of industrial robots:
Usually refers to the “programmable industrial robots” that are currently commercialized and used internationally, also known as “teaching and reproducing industrial robots”, that is, in order for the industrial robot to complete a certain task, the operator will first complete the task. All kinds of knowledge (such as motion trajectory, operating conditions, operating sequence and operating time, etc.) of industrial robots can be "teached" through direct or indirect means. After the industrial robots memorize this knowledge, they can "reproduce" Instructions, within a certain accuracy range, faithfully reproduce various taught actions repeatedly. In 1962, the first Unimate industrial robot of Universal Automation of the United States was put into use in General Motors of the United States, marking the birth of the first generation of industrial robots.
2, Second generation of industrial robots:
usually refers to an "intelligent robot" with some kind of intelligence (such as touch, force, vision, etc.). That is, after the sensors receive information such as touch, force and vision, the computer controls the robot's operating machine to complete the corresponding appropriate operations. In 1982, General Motors in the United States equipped the industrial robot with a vision system on the assembly line, thus announcing the advent of a new generation of intelligent industrial robots.
3, Third generation of industrial robots:
is the so-called "only-type industrial robot". It not only has a perception function, but also has certain decision-making and planning capabilities. The first generation of industrial robots is still in the laboratory research stage. After the birth-growth-maturity period, industrial robots have become indispensable core equipment in the manufacturing industry. There are about 750,000 industrial robots in the world fighting side by side with workers and friends on all production lines.
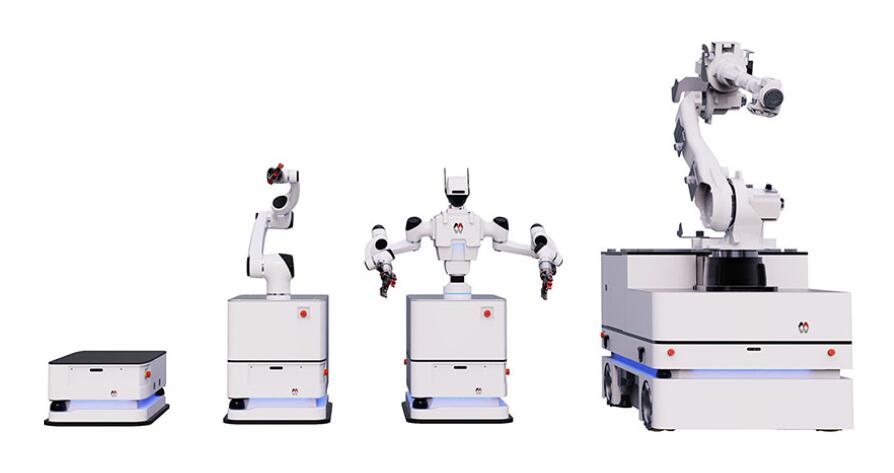
As a rising star of the robot family, special robots have a tendency to come from behind due to their wide range of uses. Special robots for various purposes such as humanoid robots, agricultural robots, service robots, underwater robots, medical robots, military robots, and entertainment robots have emerged , And it is moving towards practicality at a rapid pace.
Classification of industrial robots
Industrial robots can be divided into the following types according to different methods
1. Industrial robots are divided into the following categories according to the coordinate form of the manipulator: (The coordinate form refers to the form of the reference coordinate system taken by the arm of the manipulator when it is moving.)
(1) Cartesian coordinate industrial robot

Its movement part is composed of three mutually perpendicular linear movements (namely PPP), and its working space is rectangular. Its moving distance in each axis can be read directly on each coordinate axis. It is intuitive, easy to program and calculate the position and posture, has high positioning accuracy, no coupling control, simple structure, but the body occupies a large space. The motion range is small, the flexibility is poor, and it is difficult to coordinate with other industrial robots.
(2) Cylindrical coordinate industrial robot

Its motion form is realized by a motion system composed of one rotation and two movements. Its working space is cylindrical. Compared with the rectangular coordinate industrial robot, under the same working space conditions, the body occupies a small volume. The range of motion is large, and its position accuracy is second only to Cartesian coordinate robots, and it is difficult to coordinate with other industrial robots.
(3) Spherical coordinate industrial robot

Also known as polar coordinate industrial robot, its arm movement consists of two rotations and one linear movement (ie RRP, one rotation, one pitching and one telescopic movement). Its working space is a sphere, which can make up and down pitching movements. And it can grasp the coordinated workpiece on the ground or teach low position, its position accuracy is high, and the position error is proportional to the arm length.
(4)Multi-joint industrial robot

Also known as a rotary coordinate industrial robot. The arm of this industrial robot is similar to the upper limb of a human body. Its first three joints are the revolving joint (RRR). The industrial robot is generally composed of a column and a large and small arm. The column and the big arm are formed An elbow joint is formed between the shoulder joint, the upper arm and the forearm, which can make the upper arm rotate and pitch and swing, and the lower arm can make pitch swing. Its structure is the most compact, flexible, and has the smallest footprint. It can work in coordination with other industrial robots, but it has low position accuracy, balance problems, and control coupling. This type of industrial robot is more and more widely used.
(5)Planar joint type industrial robot

It uses a mobile joint and two rotary joints (PRR), the mobile joint realizes up and down movement, and the two rotary joints control the front and back, left and right movements. This form of industrial robot is also known as (SCARA (Seletive Compliance Assembly Robot Arm) assembly robot. It is flexible in the horizontal direction, and has great rigidity in the vertical direction. It has a simple structure and flexible movements, and is mostly used for assembly operations. It is especially suitable for plug-in assembly of small-sized parts, such as plug-in and assembly in the electronics industry.
2. Industrial robots are divided into the following categories according to the driving mode:
(1) Pneumatic industrial robot
This type of industrial robot uses compressed air to drive the manipulator. Its advantages are convenient air source, rapid action, simple structure, low cost, and no pollution. The disadvantage is that the air is compressible, resulting in poor working speed stability. The source pressure is generally only about 6kPa, so the snatch force of this type of industrial robot is small, generally only tens of Newtons, and the maximum is more than 100 Newtons.
(2) Hydraulic industrial robot
The hydraulic pressure is much higher than the air pressure, generally about 70kPa, so the hydraulic transmission industrial robot has a large snatch capacity, which can reach thousands of newtons. This type of industrial robot has compact structure, smooth transmission, and sensitive action, but it has high requirements for sealing and is not suitable for working in high or low temperature environments.
(3) Electric industrial robot
This is the most used type of industrial robot, not only because of the large variety of electric motors, it provides a variety of options for industrial robot design, but also because they can use a variety of flexible control methods. In the early days, stepper motors were used to drive, and then DC servo drive units were developed. At present, AC servo drive units are also developing rapidly. These drive units either directly drive the manipulator, or are driven after deceleration through a device such as a harmonic reducer. The structure is very compact and simple.
Industrial robot control system
The structure of the robot system consists of the robot's mechanism part, sensor group, control part and information processing part. The control system is a core part of the robot industry.
1. Functions to be achieved by the industrial robot control system
The robot control system is used to control the manipulator to complete specific tasks. Its basic functions are as follows:
(1) Memory function:
Store job sequence, movement path, movement mode, movement speed and information related to production process.
(2) Teaching function:
Offline programming, online teaching, indirect teaching. Online teaching includes teaching box and guided teaching.
(3) Contact function with peripheral equipment:
Input and output interface, communication interface, network interface, synchronization interface.
(4) Coordinate setting function:
There are four coordinate systems: joint, absolute, tool, and user-defined.
(5) Man-machine interface:
Teaching box, operation panel, display screen.
(6) Sensor interface:
Position detection, vision, touch, force, etc.
(7) Position servo function:
Robot multi-axis linkage, motion control, speed and acceleration control, dynamic compensation, etc.
(8) Fault diagnosis safety protection function:
System status monitoring during operation, safety protection under fault conditions and fault self-diagnosis.
2. Composition of industrial robot control system
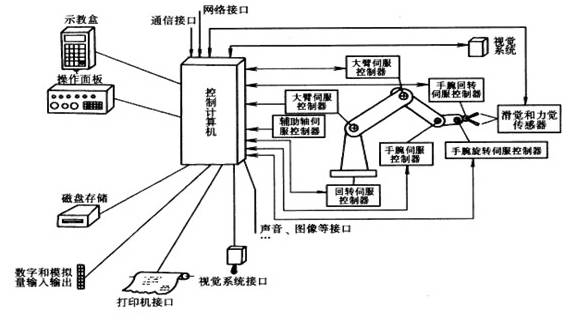
The block diagram of the robot control system
(1) Control computer:
The dispatch and command organization of the control system. Generally, microcomputers and microprocessors are 32-bit, 64-bit, etc., such as Pentium series CPUs and other types of CPUs.
(2) Teaching box:
Teach the robot's work trajectory and parameter settings, as well as human-computer interaction, have its own independent CPU and storage unit, and realize information interaction with the host computer through serial communication.
(3) Operation panel:
is composed of various operation buttons and status indicators, and only completes basic functional operations.
(4) Hard disk and floppy disk storage:
Peripheral memory for storing robot work programs.
(5) Digital and analog input and output:
Input or output of various status and control commands.
(6) Printer interface:
Record various information that needs to be output.
(7) Sensor interface:
is used for the automatic detection of information to realize the compliant control of the robot, generally force, touch and vision sensors.
(8) axis controller:
Complete the robot joint position, speed and acceleration control.
(9) Auxiliary equipment control:
is used to control auxiliary equipment that cooperates with the robot, such as gripper positioner, etc.
(10) Communication interface:
Realize the exchange of information between robots and other devices, generally serial interfaces, parallel interfaces, etc.
(11) network interface
1) Ethernet interface: Direct PC communication of several or single robots can be realized through Ethernet, the data transmission rate is up to 10Mbit/s, and the application program can be programmed directly on the PC with windows library functions, and the TCP/IP communication protocol can be supported , Load data and programs into each robot controller through the Ethernet interface.
2) Fieldbus interface: supports a variety of popular fieldbus specifications, such as Device net, AB Remote I/O, Interbus-s, profibus-DP, M-NET, etc.
3. Classification of industrial robot control systems
(1) Program control system:
Apply a certain regular control function to each degree of freedom, and the robot can realize the required space trajectory.
(2) Adaptive control system:
When the external conditions change, in order to ensure the required quality or to improve the control quality with the accumulation of experience, the process is based on the observation of the state of the operating machine and the servo error, and then adjust the parameters of the nonlinear model until the error Until it disappears. The structure and parameters of this system can change automatically with time and conditions.
(3) Artificial Intelligence System:
It is impossible to compile motion programs in advance, but requires real-time determination of the control effect based on the obtained surrounding state information during the motion.
Drive mode: see industrial robot drive system.
Exercise method:
(4) Point type:
requires the robot to accurately control the pose of the end effector, regardless of the path;
(5) Track type:
requires the robot to move according to the trajectory and speed taught.
(6) Control bus:
International standard bus control system. Use international standard bus as the control bus of the control system, such as VME, MULTI-bus, STD-bus, PC-bus.
(7) Custom bus control system:
The bus defined and used by the manufacturer itself is used as the control system bus.
(8) Programming method:
Physical setting programming system. The operator sets a fixed limit switch to realize the program operation of starting and stopping, which can only be used for simple picking and placing operations.
(9) Online programming:
The memory process programming method of operating information is completed through human teaching, including direct teaching (ie hand-to-hand teaching) simulation teaching and teaching box teaching.
(10) Offline programming:
Do not teach directly to the actual robot, but separate from the actual working environment, generate a teaching program, and generate the robot trajectory remotely offline by using high-level robots and programming languages.
4. Robot control system structure
Robot control systems can be divided into three categories according to their control methods.
(1) Centralized Control System (Centralized Control System):
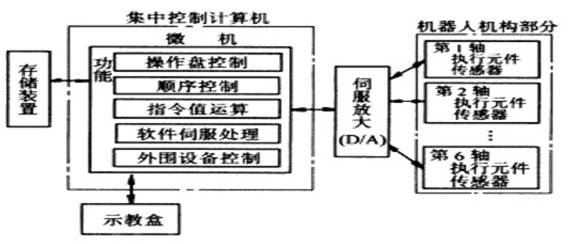
Centralized control system block diagram
A computer is used to realize all control functions. The structure is simple and the cost is low, but the real-time performance is poor and it is difficult to expand. This structure is often used in early robots. The block diagram is shown in the figure.
The PC-based centralized control system takes full advantage of the openness of PC resources, and can achieve good openness: a variety of control cards, sensor devices, etc. can be integrated into the control through standard PCI slots or through standard serial ports and parallel ports. System.
The advantages of centralized control systems are: low hardware costs, easy information collection and analysis, easy to achieve optimal control of the system, better integrity and coordination, and more convenient PC-based system hardware expansion. Its shortcomings are also obvious: the system control lacks flexibility, and the control danger is easy to concentrate. Once a failure occurs, its impact is wide and the consequences are serious; because the real-time requirements of industrial robots are very high, when the system performs a large amount of data calculation, it will reduce the real-time performance , The system’s responsiveness to multitasking will also conflict with the system’s real-time performance; in addition, the system’s complex wiring will reduce the system’s reliability.
(2) Master-slave control system:
Using master and slave two-level processors to realize all control functions of the system. The main CPU realizes management, coordinate transformation, trajectory generation and system self-diagnosis, etc.; the slave CPU realizes the motion control of all joints. Its composition block diagram, as shown in the figure.
The master-slave control system has good real-time performance and is suitable for high-precision and high-speed control, but its system scalability is poor and maintenance is difficult.
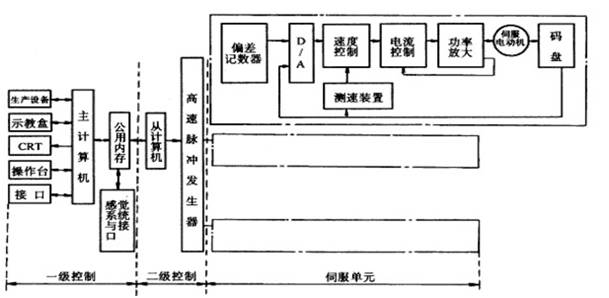
Block diagram of master and slave control system
(3) Distribute Control System:
According to the nature and method of the system, the system control is divided into several modules. Each module has different control tasks and control strategies. Each mode can be a master-slave relationship or an equal relationship.
This method has good real-time performance, is easy to realize high-speed, high-precision control, is easy to expand, and can realize intelligent control. It is a popular method at present.
The main idea is "decentralized control, centralized management", that is, the system can comprehensively coordinate and allocate its overall goals and tasks, and complete the control tasks through the coordination of subsystems. The entire system is functional, logical, and physical. It is decentralized, so the DCS system is also called a distributed control system or a distributed control system.
In this structure, the subsystem is composed of a controller and different controlled objects or devices, and each subsystem communicates with each other through a network. The distributed control structure provides an open, real-time and accurate robot control system. Two-level control methods are often used in distributed systems.
Two-level distributed control system, usually composed of upper computer, lower computer and network. The upper computer can carry out different trajectory planning and control algorithms, and the lower computer can carry out the research and realization of interpolation and subdivision and control optimization. The upper computer and the lower computer work in coordination with each other through the communication bus. The communication bus here can be in the form of RS-232, RS-485, EEE-488 and USB bus.
Now, the development of Ethernet and fieldbus technology provides robots with faster, stable and effective communication services. Especially the field bus, which is applied to the production site to realize two-way multi-node digital communication between microcomputerized measurement and control equipment, thus forming a new type of network integrated fully distributed control system-field bus control system FCS (Filed bus Control System) ).
In the factory production network, the devices that can be connected via fieldbus are collectively referred to as "field devices/instruments". From the perspective of system theory, industrial robots, as one of the production equipment of the factory, can also be summarized as field equipment. After the introduction of fieldbus technology in the robot system, it is more conducive to the integration of robots in the industrial production environment.
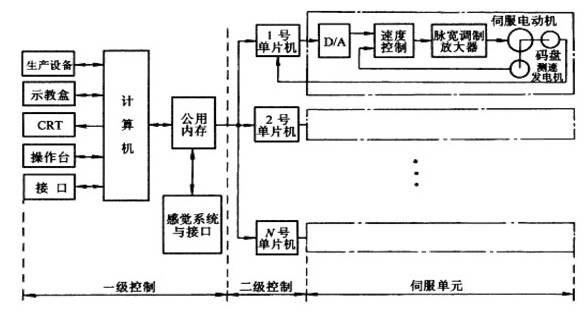
Block diagram of distributed control system
The advantages of the distributed control system are: system flexibility is good, the risk of the control system is reduced, the use of multi-processor distributed control is conducive to the parallel execution of system functions, the processing efficiency of the system is improved, and the response time is shortened.
For industrial robots with multiple degrees of freedom, centralized control handles the coupling relationship between each control axis very well, and can be easily compensated. However, when the number of axes increases to make the control algorithm very complicated, its control performance will deteriorate. Moreover, when the number of axes in the system or the control algorithm becomes very complicated, it may lead to the redesign of the system. In contrast, each motion axis of the distributed structure is processed by a controller, which means that the system has less coupling between axes and higher system reconfiguration.
"Industry 4.0" refers to the fourth industrial revolution after steam engine, electrification and automation. It combines traditional industry with digital information technology and realizes intelligent production with the help of technologies such as big data and cloud computing. In China, "Industry 4.0" means the upgrading of the country's manufacturing industry. For this reason, China has specifically put forward the development goal of "Made in China 2025". The goal is to move from a major manufacturing country to a strong manufacturing country by 2025.

TEL: +86-4000988557;
Teams: gfreex@hotmail.com;
WeChat: Troysupply_com;
QQ ID: 8936906.





















Please read on, stay posted, subscribe, and we welcome you to tell us what you think.
 IPv6 network supported 粤ICP备2021036697号
IPv6 network supported 粤ICP备2021036697号 Online service
Online service 4000988557
4000988557 sales1@troysupply.comsales2@troysupply.com
sales1@troysupply.comsales2@troysupply.com Richard Liu
Richard Liu TROY
TROY 8936906
8936906 Troysupply_com
Troysupply_com